
Vous n’en doutez certainement plus, le géo-positionnement a été un levier particulièrement puissant pour de nombreuses applications agricoles et itinéraires culturaux. Mais êtes-vous bien au clair sur l’étendue des systèmes, outils et méthodes de géo-positionnement ? Si vous êtes français, vous devriez raffoler des abréviations – alors accrochez-vous : GPS, GNSS, EGNOS, DOP, TTF, SBAS, LBAS, WAAS, RTCM, CMR, dGPS, RTK, MAC, VRS, PPP, PPK, nRTK, RTX, PPP-RTK, NTRIP… Vous en voulez encore ? Après pas mal de recoupements de sources issues d’articles scientifiques, de forums, blogs, rapports, ou encore de séminaires, j’apporte ici ma contribution pour essayer de lever le voile sur le sujet. Cet article pourra paraitre un peu catalogue mais j’essaierai au maximum de faire le lien entre les parties pour que la lecture soit agréable ! Of course, j’en profiterai bien sûr pour discuter un peu d’Agriculture de Précision.
Les constellations de satellites de navigation
Sans les satellites, on aurait relativement du mal à se positionner précisément à la surface du globe. Et des satellites, il commence à y en avoir pas mal…. La constellation que tout le monde a en tête est certainement celle tout droit venue des Etats-Unis – GPS [Global Positioning System] – originellement connue sous le nom de Navstar GPS [Navigation Satellite Time and Ranging] ; les américains en ont donc légèrement simplifié le nom. Il faut bien garder à l’esprit que la constellation GPS est américaine ; il faut en réalité parler de GNSS [Global Navigation Satellite System] pour être plus large et étendre la dénomination à l’ensemble des constellations satellitaires mondiales. La constellation GPS est opérationnelle et utilisables dans le cadre d’activités publiques depuis le milieu des années 90. Elle était composée à l’époque de 24 satellites en orbite, chacun étant classé dans un bloc (Bloc I, Bloc II, Bloc IIA, Bloc IIR…) représentant la génération de satellites dans laquelle il faisait partie. A l’heure où cet article est écrit, 32 satellites composent la constellation GPS – ces satellites étant distribués sur trois orbites indépendantes. Pour des raisons stratégiques et géopolitiques assez évidentes, les grandes puissances du monde ont, elles aussi, lancé leur propre constellation pour ne pas être dépendants des systèmes de positionnement déployés par les américains (Figure 1). Les Russes ont mis en place leur constellation « GLONASS » (24 satellites), les Européens « GALILEO » (26 satellites), les Chinois « BEIDOU » (35 satellites), les Indiens « IRNSS » (7 satellites), et les Japonais « QZSS » (3 satellites). Quand on commence à sommer tous ces satellites, ça commence à en faire un sacré paquet. Ces constellations ne sont pas encore toutes complètement opérationnelles – elles fonctionnent, certes, mais s’y ajouteront encore quelques satellites (la constellation GALILEO en attend par exemple encore 4). Et ces constellations ne sont pas indépendantes, bien au contraire. Certaines solutions dites de multi-constellations tirent profit de satellites de constellations différentes pour améliorer la qualité du signal reçu. La raison est assez simple : si le récepteur de signal satellite au niveau de la Terre capte plus de satellites, la précision du positionnement ne peut qu’en être améliorée – nous aurons l’occasion d’y revenir !
D’une manière générale, les satellites de navigation sont positionnés sur deux orbites principales : l’orbite géostationnaire (GEO pour Geostationary orbit) ou l’orbite moyenne (MEO pour Medium Earth Orbite), la grande majorité étant disposée néanmoins sur une orbite moyenne :
- L’orbite géostationnaire autour de la Terre se situe à une altitude de près de 36000 km. Un satellite sur une orbite géostationnaire, dit « satellite géostationnaire », se déplace alors à la même vitesse que la rotation de la Terre et apparait donc fixe au-dessus d’une certaine zone (cette zone spécifique est appelée la zone de couverture du satellite). Les satellites géostationnaires sont donc idéaux pour couvrir une zone fixe sur la Terre (on peut faire le parallèle avec les satellites dits d’observation de la terre, qui eux, sont plutôt sur une orbite héliosynchrone leur mettant de passer toujours à la même heure solaire locale au-dessus d’un lieu donné).
- L’orbite moyenne autour de la Terre, quant à elle, se situe plutôt à une altitude autour de 20000 km. A cette altitude, le satellite met entre 2 et 12 heures pour faire le tour de la Terre. L’avantage de cette orbite est qu’elle est très stable, et que les signaux envoyés par le satellite peuvent être reçus sur une grande partie de la surface du globe terrestre.
Pourquoi avoir choisi une orbite moyenne plutôt qu’une orbite basse ou une orbite géostationnaire ? Par rapport à l’orbite géostationnaire, une première réponse assez simple est qu’il faut un lanceur de satellites bien moins puissant (il y a quelques milliers de kilomètres de moins à parcourir, ce n’est pas complètement négligeable….). Une deuxième réponse a plutôt attrait au temps que met le signal émis par le satellite pour arriver jusqu’à la Terre – on parle de « latence ». Depuis un satellite géostationnaire, le signal effectue un aller-retour en 240 millisecondes. Cette latence est réduite à près de 50 millisecondes depuis une orbite moyenne. Et en fonction des applications imaginées, la réduction de cette latence peut être très intéressante ! En orbite basse, cette latence pourrait être encore plus faible, mais au vu de la couverture plus étroite des satellites en orbite basse (ils voient moins de choses puisqu’ils sont plus bas en altitude), il faudrait beaucoup plus de satellites en orbite basse qu’en orbite moyenne. Disons alors que l’orbite moyenne pour les satellites de navigation est plutôt un bon compromis.
Qu’est ce que nous transmettent les satellites ?
Chaque satellite transmet deux types de message : l’almanach et les éphémérides. L’almanach consiste en une information générale sur la localisation et la santé du satellite dans la constellation. Un récepteur GNSS ayant un almanach à jour connaît donc approximativement sa première position, le jour et l’heure, et connaît donc les lieux où il doit scruter l’espace pour rechercher les satellites. Les éphémérides, quant à elles consistent en une information précise de la position du satellite utilisée pour faire les mesures de calcul des distances. Chaque satellite transmet ses propres éphémérides. Ces deux données que sont l’almanach et les éphémérides sont essentielles au récepteur GNSS pour localiser les satellites, acquérir les signaux et calculer votre position géographique.
Les satellites des différentes émettent des signaux en permanence, et ce sur différentes fréquences correspondant à des longueurs d’onde spécifiques. Dans le cadre du GPS, c’est par exemple sur les fréquences L1 (1575.42 MHz) et L2 (1227.60 MHz) – on parle plutôt des fréquences E1, E5 ou E6 pour Galileo. Les signaux satellitaires comportent deux types principaux d’information : (1) les codes PRN (Pseudo Random Noise) qui permettent d’identifier le satellite et de calculer la distance entre le satellite et le récepteur, et (2) les messages de navigation qui permettent de savoir précisément où se trouve le satellite (Figure 1). Le code PRN utilisé pour les applications civiles est dit « code C/A » alors que celui plutôt utilisé par l’armée – et crypté – est dit « code P » (le code C/A est transmis seulement sur la fréquence L1 alors que le code P est transmis sur les fréquences L1 et L2). Les codes PRN sont une suite de 0 et de 1, propre à chaque satellite, et peuvent être compris comme une signature, très précisément localisée dans le temps, de chaque satellite. Les codes ont une allure aléatoire – d’où leur nom Pseudo Random Noise – mais transmettent bien en réalité une information précise. Un récepteur est donc capable, à partir d’une portion de code PRN, de reconnaître le signal, de savoir de quel satellite il a été émis, et de connaitre son horaire d’émission très précise. En comparant cette horaire d’émission du satellite avec l’horaire de réception au niveau du récepteur, il est possible d’en déduire la durée du trajet et par conséquent la distance qui sépare le récepteur du satellite puisque l’on connait la vitesse de propagation du signal radio (vitesse = distance / temps). Pour être précis, on parle plutôt de pseudo-distance entre le récepteur et le satellite, plus que de distance, parce que la durée de trajet n’est pas parfaitement exacte (on peut avoir des décalages entre l’horloge atomique des satellites, et les horloges moins précises au niveau du sol).
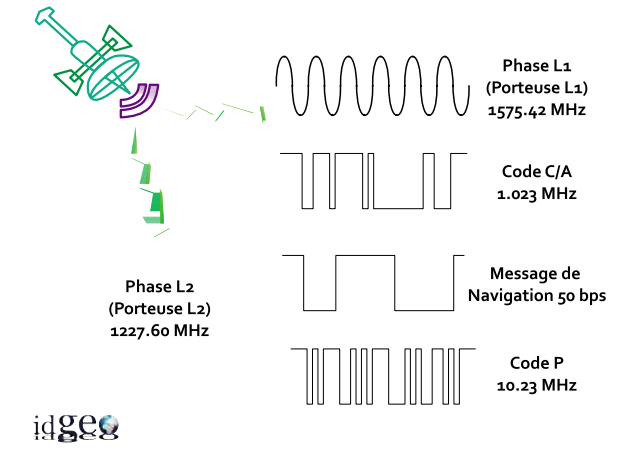
Figure 1. Structure du signal d’un satellite GPS. Source : IDGEO (Institut de Développement de la Géomatique), présenté dans Lahaye et Ladet (2014).
On vient donc de voir qu’en utilisant le code C/A et la pseudo-distance entre récepteur GNSS et satellite, on était capable de se positionner. Et ça c’est assez chouette ! Néanmoins, avec ce type de positionnement on est souvent assez limité à des précisions de l’ordre du mètre (précision métrique). Quand on veut être plus précis, et notamment quand le récepteur GNSS est en mouvement, on doit changer de méthode, et utiliser la phase du signal (ça vous rappelle quelques vieux cours de physique de lycée ?) plutôt que son code (Figure 2). Pour information, c’est ce qu’on fait avec le RTK ! On travaille dans ce cas-là avec toute la caractéristique de l’onde sinusoïdale plutôt qu’avec le simple code qui est transporté, donc en gros, il y a moyen d’être plus précis ! Plus que la phase, c’est surtout le déphasage (ou décalage de phase) entre le signal émis par le satellite et celui reçu par le récepteur qui nous intéresse. Le décalage, en soi, ça ne parait pas si compliqué que ça. Il suffit de décaler dans le temps l’onde reçue pour qu’elle matche bien l’onde émise. Le déphasage, okay, mais de combien d’oscillations exactement ? Sur une onde sinusoïdale, quand j’ai mis en phase les deux ondes, je peux décaler d’une oscillation et je suis toujours en phase ; idem avec deux, trois, quatre, etc oscillations. Là, ça devient nettement plus complexe, et c’est ce qu’on appelle l’ambiguité. Toutes les méthodes qui travaillent avec la phase du signal satellitaire pour améliorer le positionnement cherchent à lever le voile de l’ambiguité. La question à laquelle on cherche une réponse, c’est : Quel est le nombre d’oscillations qu’il y a eu entre l’émission et la réception du signal ? Si ça vous intéresse, vous pouvez aller regarder du côté des méthodes des fronts d’ondes émis par les satellites, fronts qui sont recroisés pour estimer au mieux la position de l’opérateur sachant que la position de l’opérateur ne change pas alors que les satellites, eux, sont mobiles dans l’espace. Mais nous n’irons pas plus loin que ça dans cet article !
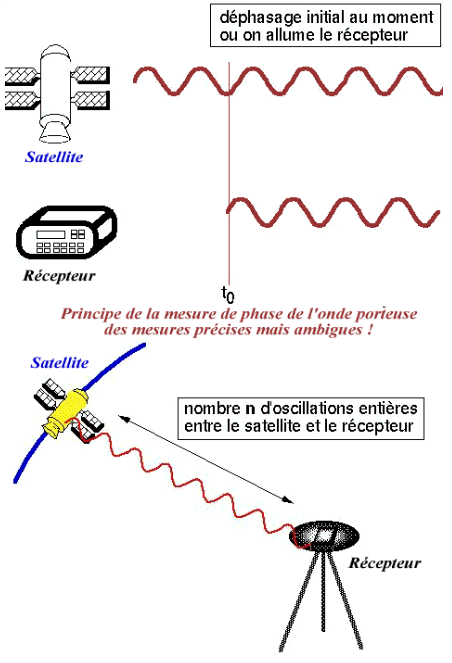
Figure 2. L’ambiguité du signal GPS. Source: Planet Terre – ENS de Lyon
Les sources d’erreur de positionnement
Le satellite transmet donc son signal jusqu’à un récepteur sur Terre qui analyse ce signal et en déduit un positionnement. Trop simple, non ? Si on veut se positionner avec une précision de +/- 100 mètres, on peut dire que oui. Gloups ! Il y a en réalité un grand nombre de sources potentielles d’incertitude et d’erreur qui viennent limiter la précision du positionnement.
Le calcul du géopositionnement peut être basé sur deux mesures : (1) soit la mesure du temps qu’ont mis les signaux émis par au moins quatre satellites pour parcourir la distance les séparant du mobile, (2) soit le décalage de phase des signaux auquel cas un appareillage très sophistiqué doit lever des ambiguïtés (nombre des oscillations entre l’émission du signal par le satellite et la réception par le mobile). Théoriquement (1) doit donner une précision décimétrique et (2) doit donner une précision millimétrique mais des sources d’erreur viennent la parasiter.
En voici les principales :
- Les sources d’erreurs atmosphériques : Avant d’arriver jusqu’au sol, les signaux satellitaires doivent traverser l’atmosphère (Figure 3), et notamment deux de ces couches ; la troposphère et la ionosphère. Dans la troposphère, l’humidité et les variations de pression modifient l’indice de réfraction troposphérique, et par conséquent impactent la vitesse et la direction de propagation du signal. L’ionosphère n’est pas vraiment une couche en soi mais caractérise plutôt diverses couches de particules ionisées et d’électrons se trouvant à des altitudes de 80 à 250 km dans l’atmosphère. Ces couches ionisées par le rayonnement solaire (surtout par les rayons X et ultraviolets) modifient elles aussi la vitesse de propagation du signal. Notez que les perturbations ionosphériques sont les plus gênantes, et que les zones proches de l’équateurs sont les plus touchées par ces problématiques.
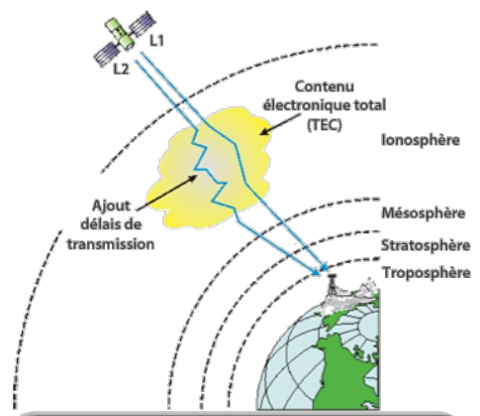
Figure 3. Effets de la réfraction ionosphérique. Les signaux GPS sont affectés de différentes manières, selon qu’il s’agisse de codes ou de phases. Source : Réflexions. Université de Liège.
- Les erreurs dans la géométrie des satellites: Lorsque les satellites sont bien répartis dans le ciel et qu’aucun obstacle ne vient en perturber la visibilité (montagne, bâtiments…), on considère que la géométrie des satellites est plutôt bonne. Dans un monde parfait, si on connaissait la distance d’un récepteur sur Terre à plusieurs satellites visibles, on pourrait trouver le positionnement précis de ce récepteur en croisant les cercles autour de chaque satellite (les cercles auraient comme rayon la distance du satellite au récepteur). On aurait alors un unique point lorsque les cercles se croisent. Malheureusement, avec l’erreur de géométrie des satellites, on a plutôt une petite surface qu’un point. L’effet de la géométrie des satellites sur les erreurs de positionnement est appelé DOP (pour Dilution of Precision ou affaiblissement de la précision). Le DOP est d’ailleurs parfois présent dans les jeux de données d’Agriculture de Précision, pensez à y jeter un coup d’œil. Il n’y a pas vraiment de valeurs de référence pour les valeurs de DOP même si assez généralement, il est considéré que 1 à 2 est excellent, 3 à 4 est bon, 5 à 7 est acceptable et 8 ou plus est pauvre. Tout dépend en réalité de l’application de terrain envisagée, ça reste un arbitrage… Vous pouvez même parfois trouver des informations d’erreurs de géométrie satellitaire qui vont un peu plus loin que le DOP. On pourra par exemple trouver les valeurs HDOP, VDOP, PDOP, TDOP ou encore GDOP, qui, respectivement clarifient l’erreur horizontale, verticale, de position, de temps, et géométrique.
- Les erreurs dites de trajets multiples : Cette source d’erreur se comprend assez intuitivement. C’est le fait que le signal qui arrive au niveau du récepteur sur Terre peut suivre plusieurs trajets différents, notamment s’il « rebondit » sur des obstacles. A cause de ces trajets multiples, on a du mal à remonter à la vraie distance du satellite par rapport au récepteur. Et ces obstacles sont nombreux : canalisation atmosphérique, la réflexion et réfraction ionosphérique, et la réflexion d’une nappe d’eau, de montagnes, ou d’édifices. Et dans le monde agricole, on peut rajouter les forêts, les éoliennes …
- Les erreurs de chronométrage et d’orbite des satellites: Les satellites ont tous des horloges atomiques très précises et suivent des orbites déterminées (géostationnaires et orbite moyenne ; c’est ce qu’on a discuté un peu plus haut). Le problème, c’est que des petites dérives de l’horloge et des orbites sont inévitables, et qu’il faut les considérer pour corriger les signaux reçus au niveau de la Terre.
Les corrections différentielles
Heureusement, un certain nombre de personnes ont caractérisé ces sources d’erreurs et en ont proposé des corrections ! On va pouvoir être un peu plus précis qu’à +/- 100 mètres, vous êtes rassurés ? On va pouvoir distinguer deux grandes familles de corrections différentielles :
- Le LBAS (« local-based augmentation system » ou système d’augmentation local en français). On peut voir aussi passer GBAS pour « ground-based augmentation system » mais c’est la même chose.
- Le SBAS (« satellite-based augmentation systems » ou « système d’augmentation spatial » en français)
Avant de rentrer dans le détail (ne vous inquiétez pas, vous en aurez pour votre argent !), comprenez grossièrement comme son nom le laisse à penser, que le LBAS s’appuie sur une station de référence locale dont l’antenne est installée à une localisation connue, et que les corrections LBAS sont ensuite envoyées à un récepteur mobile (sur un tracteur par ex) en temps réel ou en post-traitement par des réseaux radio ou internet. Dans les corrections LBAS, on va donc retrouver les corrections dGPS, RTK et tous ses dérivés ; on y reviendra largement ! Dans le SBAS, quant à lui, les signaux satellitaires sont reçus au niveau de récepteurs et transmis à des centres de traitement pour correction. Ces corrections sont envoyées aux satellites géostationnaires via des stations de contrôles, et ce sont les satellites géostationnaires qui rediffusent les corrections au récepteur mobile (smartphone, tracteur…). Il n’y a donc pas besoin de stations de référence près de là où l’on veut se positionner. C’est dans les SBAS qu’on pourra retrouver les corrections EGNOS (et penchants étrangers), et les corrections assez connues en agriculture Omnistar, et SF1/SF2… Le SBAS est lui aussi une correction différentielle ! Allez, on rentre un peu dans le dur !
SBAS – Satellite-based augmentation systems
EGNOS et cousins mondiaux
Avec le SBAS, c’est donc le satellite géostationnaire qui renvoie les corrections de positionnement (qu’il a lui-même reçu) vers des récepteurs GNSS sur le terrain. Les signaux SBAS sont de la même nature que les signaux GNSS – c’est la raison pour laquelle l’antenne GNSS reçoit parallèlement les signaux GNSS et SBAS – et sont donc aussi sensibles aux mêmes types d’obstruction. Le fait de transmettre des données sur la même fréquence que les signaux GNSS a un gros avantage : une seule antenne est nécessaire sur le récepteur ! Faisons un tour d’horizon des services de correction différentielle SBAS, avec un focus particulier sur EGNOS, puis sur quelques services plutôt orientés en agriculture :
EGNOS (European Geostationary Navigation Overlay Service) : C’est le système SBAS européen (visible depuis toute l’Europe mais en fonction de la topographie du terrain, les satellites ne sont parfois pas bien visibles donc la correction EGNOS n’arrive pas). EGNOS est gratuit et les corrections sont diffusées notamment sur la porteuse L1 du signal GPS (voir paragraphe « Qu’est ce que nous transmettent les satellites? »), donc il n’y a pas d’antenne supplémentaire à avoir sur le récepteur pour capter EGNOS. Il s’agit bien de la constellation GPS et pas des constellations GNSS du monde entier, parce que pour l’instant, EGNOS n’est pas interopérable avec Glonass, ni Galileo – mais ce sera le cas à terme donc la correction EGNOS viendra augmenter aussi le positionnement via Glonass et Galileo [ce sera la porteuse E1 du signal Galileo]. EGNOS est intéropérable avec les systèmes SBAS d’autres régions du monde. Notez pour information les autres constellations SBAS dans le monde : « WASS » (Etats-Unis), « MSAS » (Japon), « GAGAN » (Inde), « SNAS » (Chine).
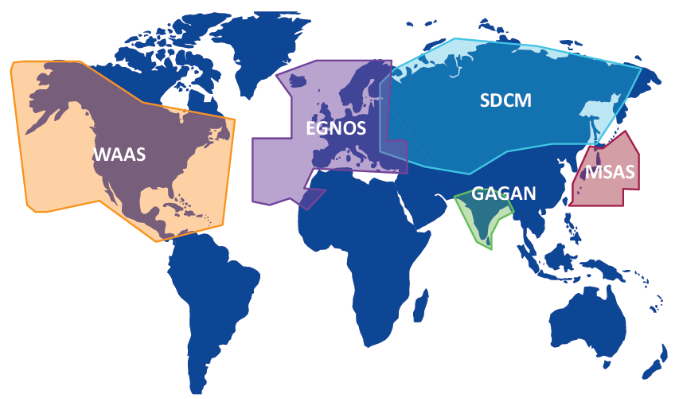
Figure 4. Les SBAS mondiaux.
La performance d’EGNOS est mesurée tous les jours. Sous de bonnes conditions, EGNOS est considérée comme une correction permettant un positionnement sub-métrique (précision à moins d’1 mètre) avec un intervalle de confiance de 95% (dans 95% des situations, c’est bien le cas). Cette précision peut même descendre à 20-30 cm dans une situation que l’on appelle « pass to pass » plutôt spécifique à l’agriculture, où l’on s’intéresse à la précision observée dans une fenêtre de temps de 15 minutes – c’est-à-dire entre un premier et un deuxième passage (pass to pass) machine au même endroit dans un court intervalle de temps.
Les 2 grands avantages d’EGNOS dont on a déjà un peu parlé : (1) c’est une correction gratuite, (2) pas de dépendance aux canaux de la radio et du GPRS pour transmettre les corrections puisque tout est transmis par les satellites géostationnaires. Notez qu’un service payant basé sur EGNOS existe aussi. C’est le service EDAS NTRIP, qui fournit des corrections DGNSS et RTK gratuites à proximité des stations de référence EGNOS. Attention néanmoins au fait que dans ce cas-là, c’est le protocole de communication NTRIP qui est utilisé – il faut donc que les récepteurs DGNSS et RTK soient compatibles avec ce protocole…
Petite précaution d’usage : Tous les six à douze mois, l’intermédiaire par lequel passe la correction EGNOS change (la fréquence de diffusion n’est plus exactement la même). Il faut donc penser à vérifier le paramétrage du récepteur, et à le changer en fonction parce que le changement ne se fait pas automatiquement.
Pour information, l’arrivée de puces GNSS puissantes dédiées aux smartphones pourra permettre de démocratiser l’usage d’EGNOS. Vous pouvez voir si vous captez cette correction à l’aide de l’application GPS-Test. Si votre smartphone est compatible, vous pourrez observer une ligne « SBAS » en bas de l’application. Il est possible que vous ne captiez pas de satellite SBAS dans votre zone, même si votre téléphone est compatible. Pour quand même le savoir, il faut regarder si deux composants de votre téléphone sont compatibles : l’antenne GNSS, et le SoC. L’un récupère les données, l’autre les traite et les mets en forme. Si l’un des deux n’est pas compatible, vous ne pouvez pas avoir de correction SBAS sur votre téléphone
SBAS orientés Agriculture
Par rapport au géopositionnement en agriculture, il est intéressant de se rendre compte que près de 80% des systèmes de guidage du secteur intègrent la correction EGNOS – elle est donc disponible ! A côté d’EGNOS, plusieurs structures ont proposé des services de géolocalisation dédiés à l’agriculture :
- Fugro fournit notamment les corrections OmniSTAR VBS (une antenne mono-fréquence ; 15-30 cm de précision), et OmniSTAR XP et Omnistar HP (antenne bi-fréquence ; 10-15 cm de précision). Les signaux OmniSTAR sont compatibles avec la grande majorité des récepteurs GPS.
- John Deere fournit les signaux de correction SF1 (gratuit) et SF2 (abonnement). Ces signaux ne devraient d’ailleurs bientôt plus être disponibles pour certaines antennes StarFire de John Deere (StarFire est assez similaire au SBAS américain WAAS). Un nouveau signal – SF3 – sera mis à disposition sur les nouvelles antennes.
LBAS – Local-based augmentation systems
J’en remets une couche ici mais au sein du LBAS, et contrairement au SBAS, les corrections sont calculées à partir d’une station de référence locale, et appliquées au récepteur mobile, soit en temps réel ou dans un logiciel de post-traitement, via internet ou radio. Il faut donc une station proche de chez soi pour être correctement localisé (Figure 5). De la même façon avec le SBAS, on travaille bien avec les signaux satellitaires ! Dans le LBAS, il y a du monde : on va revenir assez longuement sur le RTK et on va aller jeter un p’tit coup d’œil à côté avec le nRTK et le PPP.
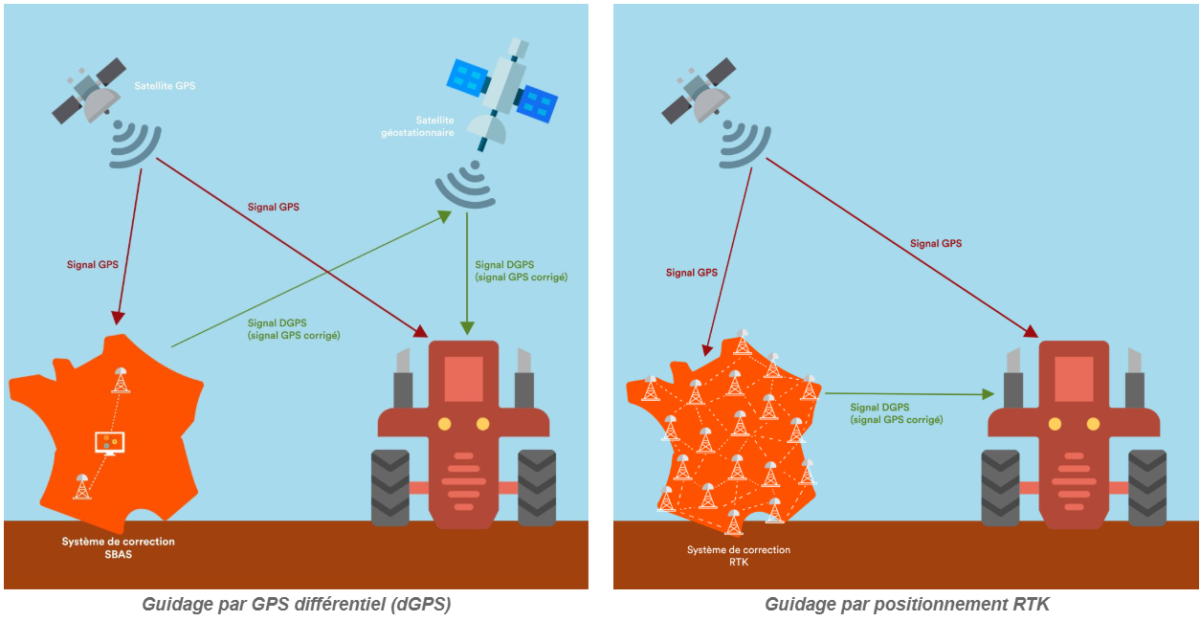
Figure 5. Différence entre un système SBAS type EGNOS et un système de positionnement RTK. Source : Teria
RTK
Avec le RTK, l’objectif, c’est clairement d’arriver à une géolocalisation très précise (dans ce cas-là, on utilise la phase et le code du signal satellitaire plutôt que son code seulement – voir le paragraphe : « Qu’est-ce que nous transmettent les satellites ? » ; avec EGNOS par exemple, on ne s’intéresse qu’au code du signal). Il y a plusieurs façons d’envisager le RTK. On peut avoir deux types de stations de bases RTK : soit placée par l’utilisateur, soit gérée par un tiers privé (on parle alors de nRTK pour network RTK – on y reviendra dans la section suivante. Dans le cas d’une station placée par l’utilisateur, la station est placée sur un point connu et envoie les corrections au récepteur par radio. La station est alors en général très proche du récepteur et l’erreur est la plus faible possible. Il faut néanmoins connaitre très précisément le point sur lequel on pose la station. Si la station est placée dans un coin de la parcelle – on parle de base mobile – il faut s’assurer de pouvoir la remettre exactement au même endroit pour éviter les problèmes de répétabilité en cas de réintervention culturale. Si la station est fixée sur un batiment – on parle plutôt de base locale – le problème précédent n’est plus au gout du jour mais il faut néanmoins s’assurer de la stabilité de l’antenne, de bonnes conditions d’observations, et d’une bonne portée des ondes radio pour transmettre les corrections (quitte à installer des répéteurs sur sa zone géographique pour diffuser les corrections jusqu’au récepteur final s’il y a des obstacles à contourner). On peut aussi distinguer les stations RTK en fonction de la façon dont les corrections sont envoyées au récepteur :
- les RTK « radio » où les corrections sont envoyées par radio, et qui peuvent nécessiter une redevance de l’autorité de régulation des communications électroniques et des Postes (ARCEP). La transmission des signaux radio des bases RTK peut se faire sur deux fréquences libres, destinées aux géomètres, pourvu qu’elle soit discontinue dans le temps (utilisation temporaire de ces fréquences dites « itinérantes »). Ces fréquences étant publiques, n’importe quel récepteur GPS compatible peut capter le signal de la base RTK tant que la correction n’est pas cryptée. Si les deux fréquences sont déjà utilisées par des bases RTK voisines, la troisième base utilisera obligatoirement une fréquence commune. Un système de guidage RTK, dans la zone de portée des deux bases utilisant la fréquence commune, sera complètement perdu. Il ne saura plus quel signal utiliser. Pour éviter ce problème, il faut demander l’attribution d’une fréquence auprès de l’ARCEP contre une rétribution annuelle. Avec la multiplication des bases, la disponibilité de fréquence devient problématique.
- Les RTK « GPRS », RTK « GSM », RTK « Téléphone ». Dans ce cas-là, la correction est transmise au tracteur par le réseau de téléphonie mobile (GPRS). Le tracteur est alors équipé d’une antenne GSM et d’un modem qui reçoit une carte SIM mono ou multi opérateur. La solution multi opérateur permet de s’affranchir des zones non couvertes par certains opérateurs.
- RTK GPRS « multibases » ou GPRS « réseau » : On est dans le cas du nRTK ici, nous en rediscuterons dans la section suivante
Utiliser des systèmes de correction RTK demande de s’intéresser à des notions de compatibilité matériel. Le récepteur doit avant tout être capable de recevoir et de traiter des corrections en étant client-RTK (ce qui n’est pour le moment pas le cas de la majorité des smartphones). Dans le cas de figure de l’agriculture, il est nécessaire de se demander si la console est capable de gérer la correction, si l’antenne est capable de capter la correction, ou encore si la marque du tracteur est compatible avec une quelconque correction. Il faut aussi garder à l’esprit que les récepteurs installés sur les machines agricoles disposent déjà de la capacité à recevoir des corrections RTK. Néanmoins, les corrections centimétriques et RTK nécessitent souvent un déverrouillage de console pour être actives – le coût de cette clé informatique pour déverrouiller la fonctionnalité peut parfois être élevé.
Le format d’émission du signal RTK doit être compréhensible par l’ensemble des récepteurs des utilisateurs du réseau. Le problème (assez récurrent dans le domaine de l’agriculture par ailleurs), c’est que la plupart des constructeurs utilisent un format propriétaire, non utilisable (ou pleinement) par les systèmes concurrents. Dans les conditions où la base et le récepteur appartiennent au même constructeur, la correction est transmise au format du constructeur, inconnu de l’utilisateur dans la plupart des cas. De nombreux agriculteurs ne peuvent donc pas bénéficier du service RTK pour cause d’incompatibilité d’équipements. L’armée américaine a néanmoins développé depuis pas mal de temps un format universel : le RTCM (Radio Technical Commission for Maritime Services). Parmi les formats propriétaires, le format de Trimble (CMR, CMR+ et CMRx) est devenu un format standard mais il demeure le format propriétaire Trimble partiellement ouvert, qui peut être modifié à tout moment par ses concepteurs.
Quelques définitions complémentaires à garder en tête :
Les signaux d’attente sont des corrections qui prennent le relais, pendant un laps de temps court (1 à 20 mn), en cas de coupure de la correction RTK. Ces signaux peuvent être des algorithmes en eux-mêmes, ou alors un autre type de correction.
Le time to first fix (TTFF ou TTF), ou en français temps de convergence ou temps de chauffe est le temps d’attente nécessaire pour que la correction soit opérationnelle après la mise en route de la console. Toutes les corrections ne sont pas concernées. Ce temps d’attente peut aller jusqu’à 25 minutes.
nRTK : Les réseaux RTK
Avec le RTK, on l’a vu, il faut une station de référence locale ! Et si on n’a pas les moyens financiers, logistiques ou matériels d’en avoir en propre, hé bien, ça commence à être un peu compliqué. On peut rajouter pas mal de désavantages au fait d’avoir des balises RTK : il faut disposer de 2 récepteurs GNSS et d’un point dégagé et connu en coordonnées ; il faut faire surveiller la base, la base a un rayon d’action limité ; il faut un lien de télécommunication pertinent type radio (UHF) et s’acquitter d’une licence d’utilisation auprès de l’ARCEP. C’est pour cela que plusieurs structures ont développé un réseau de stations sur le territoire français. Au lieu de parler de RTK, on parle alors de nRTK (« n » pour « network »). Avec ça, le géo-positionnement est externalisé à ces structures ; plus besoin de s’embêter avec une station, les coûts d’investissements et de mise en œuvre opérationnels sur la base sont limités, il n’y a pas besoin de licences radio UHF et il y a également moins de problème de disponibilité de la correction en utilisant les réseaux télécom et opérateurs mobiles en place. Il faut alors simplement payer un abonnement de géolocalisation.
Le principe du nRTK consiste à récupérer les données des bases RTK du réseau en temps réel sur un serveur central informatique par l’intermédiaire d’un réseau télécom. Lorsque le système de guidage du tracteur est mis sous tension, il envoie sa position au serveur central via la téléphonie mobile. Cette première localisation permet de situer la zone de travail de l’utilisateur. Le serveur calcule ensuite une correction correspondant au champ travaillé grâce aux données permanentes des stations du réseau, puis adapte cette correction en fonction du déplacement du tracteur au sein du réseau. Plusieurs concepts de corrections existent, chacun ayant des méthodes de calcul propres (« MAC » pour Master Auxiliary Concept ou Maitre-Esclave ; «VRS » pour Virtual Reference System ou station virtuelle ; et « FKP » pour Flächen Korrektur Parameter ou paramètres de corrections de surface). Pour information, le concept MAC est utilisé par le réseau Orphéon, le concept FKP par le réseau Teria et le concept VRS par le réseau Sat-info (voir la liste des réseaux nRTK juste après). Les corrections sont ensuite transmises par le réseau de téléphonie mobile type GSM/GPRS, ce qui nécessite d’avoir un modem dans le tracteur et d’utiliser un système de guidage compatible (les corrections peuvent être transmises aussi par radio, mais dans ce cas-là, il faut souvent se rapprocher de l’ARCEP – voir le paragraphe sur le RTK).
Voilà les principaux réseaux nRTK que l’on peut trouver en France :
- Réseau Orpheon: C’est le premier réseau nRTK full GNSS de France, comportant plus de 160 stations opérationnelles sur la France continentales (la station de référence la plus proche de l’utilisateur n’est jamais à plus de 30 km sur le territoire français). Le réseau de stations est propriété de la société Geodata Diffusion. Cette entreprise déploie également le service « Precisio », un service d’autoguidage de matériel agricole, à partir du réseau de stations Orpheon. Precisio est décliné en plusieurs offres (MSPRé, FLEXPRé, OPTIPré) et compatible avec toutes les marques de matériel d’auto-guidage et de matériel agricole, compatible avec les technologies GPS, Glonass, Beidou et Galileo. L’accès à la correction se ferait également instantanément, c’est-à-dire sans temps de convergence (le fameux Time to First Fix). Orpheon annonce une précision attendue à 1 écart type comprise entre 1-2 cm en planimétrie (Lambert 93) et 2-3 cm en altimétrie (IGN69). Le réseau Orphéon repose sur le concept de Maître-auxiliaire (MAC), c’est-à-dire que les stations de référence d’une même zone ont un certain nombre de corrections en commun – par exemple les corrections satellite ou atmosphérique.
- Réseau Teria: c’est un réseau de géomètres, fonctionnant sur un principe assez similaire à celui du réseau Orpheon. Teria propose plusieurs solutions dont notamment (1) « TERIAsat » un service 100% satellitaire GNSS réception des corrections peut se faire soit via un boitier externe, soit directement dans certains récepteurs intégrant un modem L-Band compatibles TERIAsat, et (2) « TERIAmove» dont l’objectif répondre aux exigences de localisation de précision pour tous les récepteurs dont l’antenne GNSS est en mouvement. On retrouvera donc ici un intérêt marqué dans le cadre d’agriculture de précision.
- Réseau Satinfo: c’est le réseau de stations développées par la société CLAAS. Le réseau regroupe plus de 200 stations GNSS permanentes en France pour fournir des corrections DGPS ou RTK, jusqu’à une résolution centimétrique. SatInfo propose le service RTK NET.
- Réseau VRS-tec: c’est le réseau de stations de Trimble qui fournit un service similaire au service CenterPoint (mais ici avec un réseau de stations, contrairement au service simple RTK)
- Réseau Centipede: c’est un réseau RTK en open source, à mentionner donc – même si pour l’instant il y relativement peu d’information dessus.
Le terme VRS utilisé dans le nom du réseau de Trimble – pour Virtual Reference Station – témoignent du fait que les stations de référence, de localisation connue, modélisent une erreur de géolocalisation au niveau de l’utilisateur en créant une station virtuelle là où il se trouve (et en faisant donc comme s’il y avait une station de référence près de l’utilisateur).
En fonction des réseaux de stations, et de la même façon que pour le RTK, les échanges de données peuvent être réalisés par internet (2G, GPRS, 3G) ou radio. Les réseaux ont souvent des partenariats avec des opérateurs de téléphonie, tout simplement parce qu’ils couvrent relativement bien l’ensemble du territoire. L’autorité de régulation des communications électroniques et des Postes (ARCEP) annonce notamment que 98.4% de la surface du territoire est couverte en 2G par au moins un opérateur.
Certains standards existent pour diffuser les informations de positionnement. C’est notamment le cas du protocole NTRIP pour l’échange des données et le format RTCM pour la diffusion des corrections (on parle souvent de diffusion RTCM via NTRIP parce que l’acronyme NTRIP signifie Network and Transport of Rtcm via Internet Protocol). Pour recevoir des corrections vis NTRIP, le récepteur client doit lui aussi être à la norme NTRIP. Un des autres intérêts du NTRIP est de pouvoir fournir les données de corrections à un très grand nombre de client. Nul besoin d’investir dans son propre matériel. Les observations GNSS sont souvent enregistrées dans des fichiers au format Rinex
PPK
Le principe est le même pour le RTK mais la donnée de correction n’est pas transmise en direct. Elle est stockée dans un fichier au format Rinex sur la base, ce qui permet de calculer les coordonnées d’un point stationné par l’utilisateur en utilisant un logiciel de post-traitement. Teria, Oprheon ou encore l’IGN proposent des fichiers Rinex liés à leurs bases. L’avantage est la gratuité des données pour l’IGN, ou encore la non nécessité de connexion 3G-4G.
PPP
La différence principale entre le PPP (Precise Point Positioning ou positionnement en point précis) et le RTK, c’est que le PPP utilise un seul récepteur GNSS alors que le RTK utilise une station de référence locale (fixe ou mobile) en plus d’un récepteur GNSS. Avec le PPP, le géopositionnement ne dépend donc pas de la disponibilité de données provenant de stations de référence à proximité de l’utilisateur. Il ne faut pas néanmoins voir les corrections différentielles PPP et RTK comme des concurrentes. Elles sont vouées aussi à être combinées, c’est ce que l’on discutera dans la section suivante PPP-RTK.
Attention, j’ai laissé le PPP dans la section des systèmes LBAS pour bien comprendre les différences avec le RTK, mais le système PPP se rapproche bien plus d’un SBAS que d’un LBAS puisqu’il n’y a pas de stations de référence locale.
Dans le cas du PPP, on aura tendance à utiliser des récepteurs à double fréquence (alors qu’en RTK, on diffuse plutôt sur une seule fréquence – la porteuse L1 dans le cas du GPS). Pour comprendre tout l’intérêt du multi-fréquences, dites-vous que le retard d’un signal dépend de sa fréquence donc si on envoie plusieurs signaux de différentes fréquences, on peut mieux modéliser des perturbations (tout ce qui se passe dans la ionosphère et la troposphère et qui nous embête – voir la section « Les sources d’erreur de positionnement »). Contrairement au RTK où l’on va avoir une station de base pour corriger un signal, en PPP, on n’a pas toute cette information de correction. On ne peut compenser toutes les erreurs de mesure causées par le satellite, la station et l’atmosphère qu’à l’aide de modèles empiriques ou stochastiques. La mesure de distance du récepteur à un satellite contient deux inconnues : la distance géométrique et le biais apporté par l’ionosphère qui dépend lui-même de la fréquence du signal. En utilisant une récepteur à double fréquence (bi-fréquences), c’est un peu comme si au lieu d’avoir une équation à deux inconnues, on avait deux équations à deux inconnues. Résultat des courses : on peut trouver trouver les inconnues, c’est-à-dire les perturbations du signal. Et plus les satellites transmettent de signaux sur différentes fréquences, plus le PPP trouve son intérêt ! Pour info, le service ouvert de Galileo propose même trois bandes de fréquences, ce qui permet de garder un service bi-fréquence corrigeant les biais ionosphériques même lorsque l’une des bandes de fréquences subit une interférence. La robustesse et la performance de ce service sont ainsi accrues pour les récepteurs qui utilisent ces trois fréquences au prix d’une complexité et d’un coût beaucoup plus important. Aujourd’hui, les récepteurs de nos téléphones et de nos voitures n’utilisent qu’une seule fréquence. Très prochainement, ils en utiliseront deux. Seuls des récepteurs professionnels utilisent les trois fréquences
Encore une fois, avec le PPP, on n’a besoin d’aucune correction à partir des stations de référence. Par contre, on a besoin des produits de position et d’horloge extrêmement précises des satellites. Et ces informations sont fournies gratuitement par le Service international GNSS (IGS). En tant que système de navigation et de positionnement par satellite, la précision et la fiabilité des solutions GNSS PPP dépendent fortement du nombre de satellites visibles. Lorsqu’on utilise uniquement le GPS, le nombre de satellites visibles est insuffisant pour fournir une solution de positionnement dans certaines situations, comme dans les canyons urbains, les mines à ciel ouvert, les zones montagneuses, ou encore les zones arborées en agriculture. Avec la remise au gout du jour de la constellation GLONASS et avec les constellations émergentes BeiDou et Galileo, il est maintenant possible de réaliser un PPP multi-GNSS avec environ 80 satellites opérationnels, ce qui augmente considérablement le nombre de satellites visibles.
Un des problèmes majeurs dans le cas du PPP, c’est le temps de convergence (on en a donné une définition à la fin du paragraphe sur le RTK). Vous vous souvenez que quand on travaille avec un positionnement de haute précision, on s’intéresse souvent plutôt à la phase du signal qu’à son code, et il faut donc lever le voile de l’ambiguité du signal (le nombre d’oscillations qu’il y a eu entre le satellite et le récepteur). Dans le cas du PPP, puisqu’on n’a pas de station de référence, le temps de convergence peut être très long, souvent mesuré en heures. Une couche supplémentaire de corrections, comprenant le code du satellite (pseudo-distance) et les biais de la phase de la porteuse, a permis d’obtenir le PPP avec résolution d’ambiguïté (PPP-AR pour PPP with Ambiguity Resolution). Bien qu’une amélioration du temps de convergence puisse être obtenue, le PPP-AR ne peut toujours pas concurrencer le RTK ou le nRTK en termes de temps de convergence. Avec trois fréquences ou plus, on pourrait être capable de résoudre une série d’ambiguïtés importantes en cascade (plus il y a de fréquences, moins on a de bruit dans les signaux donc on peut potentiellement résoudre plus d’ambiguités). La disponibilité du nouveau signal Galileo E6 constitue une avancée significative pour le PPP-AR, en permettant une convergence instantanée.
Dans le cas du PPP en temps réel, des données précises d’orbite et d’horloge des satellites sont aussi mises à la disposition du public par les organismes qui collaborent à l’IGS. A côté de ça, des fournisseurs commerciaux distribuent leurs données de correction exclusives obtenues grâce à divers réseaux mondiaux GNSS. Pour les applications en temps réel, un accès sans fil aux corrections est habituellement disponible par abonnement, afin de recouvrer les coûts d’exploitation des réseaux de collecte et la distribution des corrections. Puisque les erreurs de positionnement s’aggravent d’environ 1 cm pour chaque seconde de latence dans la transmission des messages de correction aux utilisateurs, l’efficacité des calculs et de la transmission messages par les réseaux est essentielle à l’obtention d’un avantage concurrentiel
Dans les chapitres précédents, on avait pu évoquer des corrections différentielles plutôt orientées agriculture type OmniSTAR et SF1/SF2/SF3 proposées par Fugro ou John Deere. Ici, on peut faire mention des signaux RTX de Trimble qui sont plutôt des signaux de type PPP, et qui peuvent attendre des précisions de l’ordre de quelques centimètres. Trimble propose notamment les services de correction RTX View Point (précision sub-métrique), RTX Range Point (précision inférieure à 50cm), et RTX CenterPoint (précision jusqu’à 4 cm). A noter également la technologie Xfill de Trimble qui vient en aide aux systèmes RTK standard lorsqu’ils perdent la connexion avec leur source de corrections primaire, une station de référence ou un flux VRS. Les corrections Trimble RTX sont transmises via un lien indépendant (un faisceau émis par un satellite sur la bande L et non la radio de la station de base) donc elles sont normalement disponibles lorsque les corrections de la station de référence font défaut.
PPP-RTK
La combinaison du PPP et du RTK est intéressante en ce sens qu’elle permet de réduire significativement les temps de convergence par rapport à ceux du PPP. Le PPP-RTK étend le concept PPP en fournissant des informations sur les biais de phase des satellites, en plus des données précises d’orbite et d’horloge des satellites. Les biais de phase sont dus en grande partie aux perturbations ionosphériques et troposphériques (que le PPP seul ne peut pas toujours bien modéliser). Grâce au PPP-RTK, on peut retrouver l’intégralité des ambiguïtés de l’utilisateur, et résoudre ainsi les ambiguïtés au niveau du récepteur GNSS. L’intérêt du PPP-RTK est donc de combiner les avantages du PPP et du RTK, en se basant sur moins de stations de bases que le RTK et, si l’utilisateur est trop loin de stations de base RTK, de se rapprocher d’un mode PPP. On peut donc imaginer des services PPP-RTK locaux (avec un temps de convergence très faible et où l’on se base sur un réseau dense de stations) et des services PPP-RTK globaux ou mondiaux (où l’on a moins de stations mais où l’on se base sur du multi-fréquences et multi-constellations pour réduire au maximum les perturbations ionosphériques et troposphériques).
Quelques éléments complémentaires sur les corrections différentielles
La correction différentielle ne compense pas pour les erreurs de valeur DOP. La valeur DOP étant calculée par le récepteur, la plupart des logiciels GPS offre des filtres empêchant l’opération ou l’enregistrement lorsque la valeur DOP atteint un seuil prédéterminé. Les erreurs de trajets multiples ne peuvent pas être résolues par une correction différentielle. Selon la correction différentielle utilisée (locale ou globale), les effets des erreurs d’orbite et de chronométrage peuvent être largement compensés. Si on se reconcentre sur l’agriculture, en fonction des solutions différentielles choisies, il ne faut pas non plus faire l’impasse sur certaines options. Le correcteur de dévers, par exemple, n’est pas monté systématiquement, et évite des imprécisions importantes dans les parcelles pentues. Le système de recalage de la ligne de référence permet de limiter la dérive de la précision pour les parcelles dans lesquelles on travaille plus d’une demi-journée.
Autoguidage vs. Guidage Assisté
Il est important de garder à l’esprit qu’il y a une différence entre guidage assisté et autoguidage. Le guidage assisté consiste à permettre aux agriculteurs d’être plus précis sur leurs déplacements ; il indique le cap à suivre. Le guidage assisté donne des informations à l’agriculteur pour suivre un tracé à l’aide de barre à diodes ou écran [le tracé n’est pas forcément droit ; il peut être curviligne ou encore circulaire]. L’autoguidage, quant à lui, s’occupe la plupart du temps de tous les mouvements des engins agricoles pour permettre aux agriculteurs de se focaliser sur d’autres détails. Le système d’autoguidage peut être rajouté sur le volant ou directement intégré sur l’hydraulique du tracteur. Il apporte la précision suffisante pour des récoltes en grande largeur ou des semis. L’agriculteur peut ensuite choisir entre l’autoguidage hydraulique qui agit sur le système hydraulique de la direction, et l’autoguidage électrique où un moteur électrique agit sur le volant ou sur la colonne de direction. Deux modes principaux d’autoguidage existent. Soit le guidage est un rééquipement n’interférant pas avec les composants du tracteur. Soit, l’autoguidage est intégré sur le tracteur et utilise le Bus CAN (controller area network, ou le raccord sur un même câble – ou bus – d’un grand nombre de calculateurs) pour transmettre les informations d’un élément à l’autre.
Usages du positionnement en agriculture
Si les outils et méthodes de géopositionnement sont maintenant plus claires pour vous, recentrons-nous avant de conclure sur leur intérêt dans le domaine de l’agriculture. Je me permets ici de présenter des travaux très lisibles de la FRCUMA Ouest pour faire le lien entre les technologies de géo-localisation présentées dans cet article de blog, et les itinéraires techniques inhérents à l’agriculture (Figure 6).
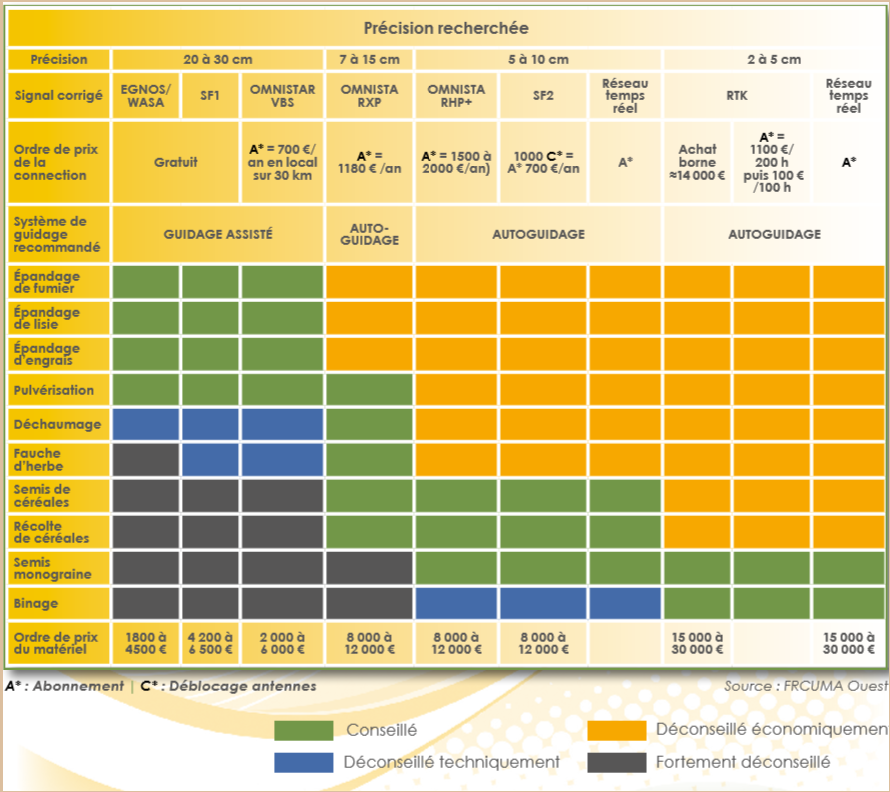
Figure 6. Quelle technologie de positionnement pour un itinéraire cultural donné ? Source : FRCUMA Ouest.
Notez bien que ces itinéraires culturaux, si réalisés avec des outils de positionnement très précis (on pense par exemple aux techniques de semis strip-till en agriculture de conservation des sols ou au binage mécanique), peuvent aussi être modulés dans l’espace et dans le temps (on peut par exemple moduler la densité de semis dans une parcelle agricole) – on parle alors de modulation intra-parcellaire.
Outre les itinéraires culturaux assez classiques listés dans ce tableau, n’oublions pas les applications envisageables peut-être plus transverses (ne nécessitant pas toujours de la très haute précision):
- Traçabilité des opérations culturales (exemple de Picore pour s’assurer que la pulvérisation a été réalisée correctement)
- Synchronisation des trajectoires entre plusieurs machines
- Certification de l’origine des productions agricoles
- …
Eléments de conclusion
L’objectif du blog était de revenir sur l’ensemble des outils et méthodes de géolocalisation de manière à comprendre leur fonctionnement et leur intérêt pour le secteur agricole. Même si l’article était très orienté sur le positionnement par satellite, n’oubliez pas que, dans certains cas, on peut se positionner parfois très précisément en agriculture sans satellite ! Pensez aux palpeurs de rang qui vont permettre de guider une machine agricole entre des rangs de cultures, aux systèmes de reprise de marque qui vont pouvoir se reloger dans un sillon ou tunnel de culture, ou encore aux systèmes de caméras/capteurs (photo-électrique, lumineux, lasers) ! Tous ces systèmes, en fonction des cas d’étude de la profession, pourront s’avérer une très bonne alternative à une mauvaise réception d’un signal de positionnement, pourront être parfois moins couteux, ou encore servir d’autres applications que le simple positionnement.
Si certains itinéraires culturaux et applications agricoles peuvent être très clairement bénéficiaires d’un géopositionnement ultra-précis, c’est loin d’être toujours le cas. Ce besoin de précision dans la géo-localisation doit être raisonné également en fonction de l’unité de travail de l’agriculteur. Pourquoi donner une information agronomique à l’échelle centimétrique, voire métrique, si l’agriculteur ne raisonne pas à cette échelle spatiale là, voire même si la machine agricole à disposition n’est pas capable de prendre en compte cette précision. La modulation intra-parcellaire en est pour moi un exemple frappant. Moduler son champ en quelques grandes zones de production à l’aide d’un smartphone, voire d’un papier accroché sur la vitre de son tracteur, peut déjà permettre de faire un très bon travail. Trop de précision tue la précision…
Et pour finir, il ne faut pas oublier que ce géo-positionnement, c’est bien beau, mais que pour localiser précisément un objet à la surface de la terre, il ne faut pas se tromper de système géodésique ! Je vous invite à aller voir un des précédents posts pour vous rafraichir la mémoire.
Quelques schémas et graphiques de synthèse
Figure 7. Classification des signaux de positionnement. Source : Chambre d’Agriculture du Val de Loire
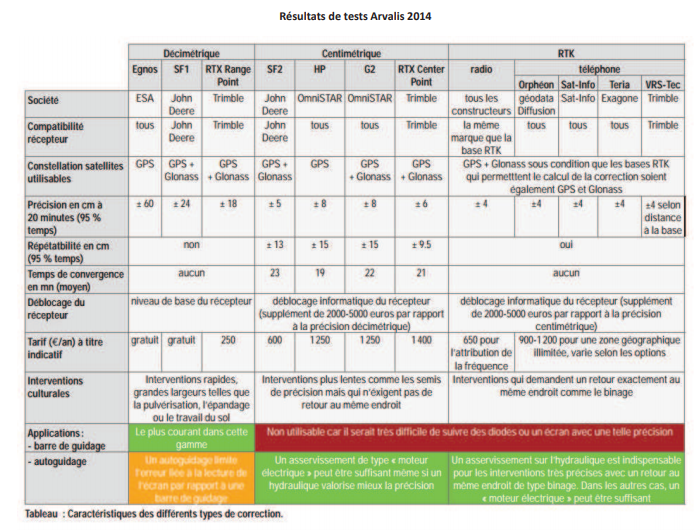
Figure 8. Résultats d’expérimentation autour de signaux de positionnement. Source : Arvalis
Quelques références intéressantes
- Chassagne (2012), Géodésie. Le futur de la navigation par satellites : une précision à un centimètre avec le PPP. Revue XYZ, 132.
- Cilla, S. (2019). GNSS and EGNOS for farming : all you need to know from this European free service. European Conference on Precision Agriculture (Keynote Speaker). Institut Agro
- Desbourdes, C. (2010). Guidage et autoguidage RTK : un panel de solutions pour une plus grande précision. Perspectives Agricoles, 370 (https://www.perspectives-agricoles.com/file/galleryelement/pj/f7/72/70/f8/370_2787406583296596256.pdf
- Desbourdes, C. (2015). Agriculture de Précision. Communications Arvalis : https://www.evenements-arvalis.fr/reunion-agriculteurs-le-8-decembre-2015-saint-jean-de-linieres-49–@/_plugins/WMS_BO_Gallery/page/getElementStream.html?id=36446&prop=file
- Deseau, S. (2016). Choisir une correction GPS. Chambre d’Agriculture Val de Loire : https://centre-valdeloire.chambres-agriculture.fr/fileadmin/user_upload/Centre-Val-de-Loire/122_Inst-Centre-Val-de-Loire/Produire_Innover/Machinisme/45_FCC-correctionGPS_12-2016.pdf
- European Global Navigation Satellite Systems Agency (2019). PPP-RTK market and technology report (https://www.gsa.europa.eu/sites/default/files/calls_for_proposals/rd.03_-_ppp-rtk_market_and_technology_report.pdf)
- Guo, J. et al. (2018). Multi-GNSS precise point positioning for precision agriculture. Precision Agriculture
- Lahaye, R. and Ladet, S. (2014). Les principes de positionnement par satellite : GNSS. Cahier des charges techniques de l’INRAE.
- Laurichesse and Banville, (2018). Innovation: Instantaneous centimeter-level multi-frequency precise point positioning. GPSWorld. https://www.gpsworld.com/innovation-instantaneous-centimeter-level-multi-frequency-precise-point-positioning/
- Séminaire Géolocalisation en Agriculture (2018). Chaire AgroTIC. Institut Agro.
Soutenez les articles de blog d’Aspexit sur TIPEEE
Un p’tit don pour continuer à proposer du contenu de qualité et à toujours partager et vulgariser les connaissances =) ?
Soutenez Agriculture et numérique – Blog Aspexit sur Tipeee
4 commentaires sur « Géopositionnement en agriculture »