
Oh my god, On va parler de robotique ! Enfin un article où on va pouvoir parler d’innovation technologique, de (r)évolution agricole – parce que la parenthèse autour du « r » est super importante – et de troisième voie de l’agriculture ! Youpi ! Alors si cet article-là ne fait pas le buzz, je ne comprends plus rien !
Hé non dommage, spoiler alerte …
La filière robotique continue à se développer fortement dans le contexte agricole. Le nombre de robots proposé ne cesse d’augmenter et pourtant, le nombre d’unités vendues reste faible. Comme toute secteur qui émerge, la filière robotique se cherche encore. Le gouvernement français semble voir d’un bon œil le développement de la robotique agricole et continue à imaginer irriguer la filière d’argent public. Dans le cadre de la stratégie d’accélération « Systèmes agricoles durables et équipements agricoles contribuant à la transition écologique » (SADEA), et du programme d’investissement d’avenir (PIA4) adossés à France 2030, l’Etat français a demandé à l’association RobAgri – l’association de la robotique en France qui regroupe près de 80 membres – d’élaborer un Grand Défi dédié à la robotique agricole. Ce défi est l’occasion pour la filière de construire des synergies entre la robotique et l’agro-écologie.
Ce dossier sur la robotique est également l’occasion de valoriser toute la connaissance qui commence à être capitalisée sur l’annuaire des outils numériques pour l’agriculture. En plus de servir la veille collaborative, cette plateforme est maintenant utilisée pour prendre du recul sur les outils numériques en place et de dégager des tendances.
Comme d’habitude, pour les lecteurs du blog, cet article est issu d’entretiens en visio avec des acteurs du secteur (dont vous trouverez les noms à la fin de l’article) que je remercie pour le temps qu’ils ont pu m’accorder. Plusieurs articles, rapports et wébinaires m’auront permis de compléter les retours d’entretiens.
Vous verrez dans les interviewés qu’il y a relativement peu de constructeurs de robots. Ce n’est pas faute d’avoir essayé…
Bonne lecture !

Soutenez Agriculture et numérique – Blog Aspexit sur Tipeee
Robotique
Préambule important
Il faut quand même avouer qu’il n’est pas évident de se retrouver dans l’écosystème robotique agricole. La filière regroupe énormément d’acteurs différents (il suffit de se plonger dans les figures 1 et 2 qui ne sont d’ailleurs certainement pas exhaustives) et il se dégage une impression d’individualisme où chaque acteur semble partir un peu dans sa propre direction avec son budget dédié. L’adoption des robots est de toute façon difficile à appréhender, à suivre et à comprendre parce que nous ne savons pas réellement où nous en sommes. Il faut déjà dire que les constructeurs et roboticiens ne nous donnent pas énormément d’informations. On peut comprendre qu’il y ait des enjeux industriels et concurrentiels certes, mais le fait de ne pas avoir de panorama clair de l’existant sur la robotique ne permet pas aux acteurs agricoles de se repérer dans cet écosystème complexe. C’est une limite que nous essayons de lever avec notre annuaire des outils numériques pour l’agriculture
Toutes les figures que vous trouverez dans ce dossier sont relatives aux outils robotiques présentés dans l’annuaire des outils numériques des agriculteurs. Ces figures seront amenées à évoluer dans le temps en fonction de la consolidation des bases de données (les informations ne sont pas toujours de qualité – faute au référencement ou au manque d’information des fournisseurs), des ajouts d’outils et/ou des retours d’utilisateurs et de fournisseurs. Cette plateforme est participative et collaborative. Chacun peut contribuer en rajoutant de nouveaux outils, en proposant des modifications sur les outils existants ou en commentant et notant les outils présents sur la plateforme.
Les robots présentés ici sont utilisés dans des contextes agricoles (végétal et animal). Je ne présente ici que des robots au sol ou proches du sol. Les robots aériens – principalement les drones – ne sont pas considérés.
Merci de bien garder ça en tête tout au long de la lecture de ce travail !
Panorama de la robotique agricole par filière
Il y a encore quelques années, on aurait pu dire que la filière robotique était quasi inexistante dans le giron agricole. L’intérêt était plutôt porté sur le développement des outils numériques (capteurs, outils d’aide à la décision, logiciel de gestion…). Le vent semble maintenant avoir tourné et, si l’impression générale autour des outils numériques est celle d’une évolution assez lente et peut-être en cours d’essoufflement, les robots quant à eux, se sont largement développés. Le panorama des systèmes robotiques est extrêmement large (cf figures 1 et 2)
Figure 1. Panorama des robots en production animale. Source : Annuaire des outils numériques des agriculteurs
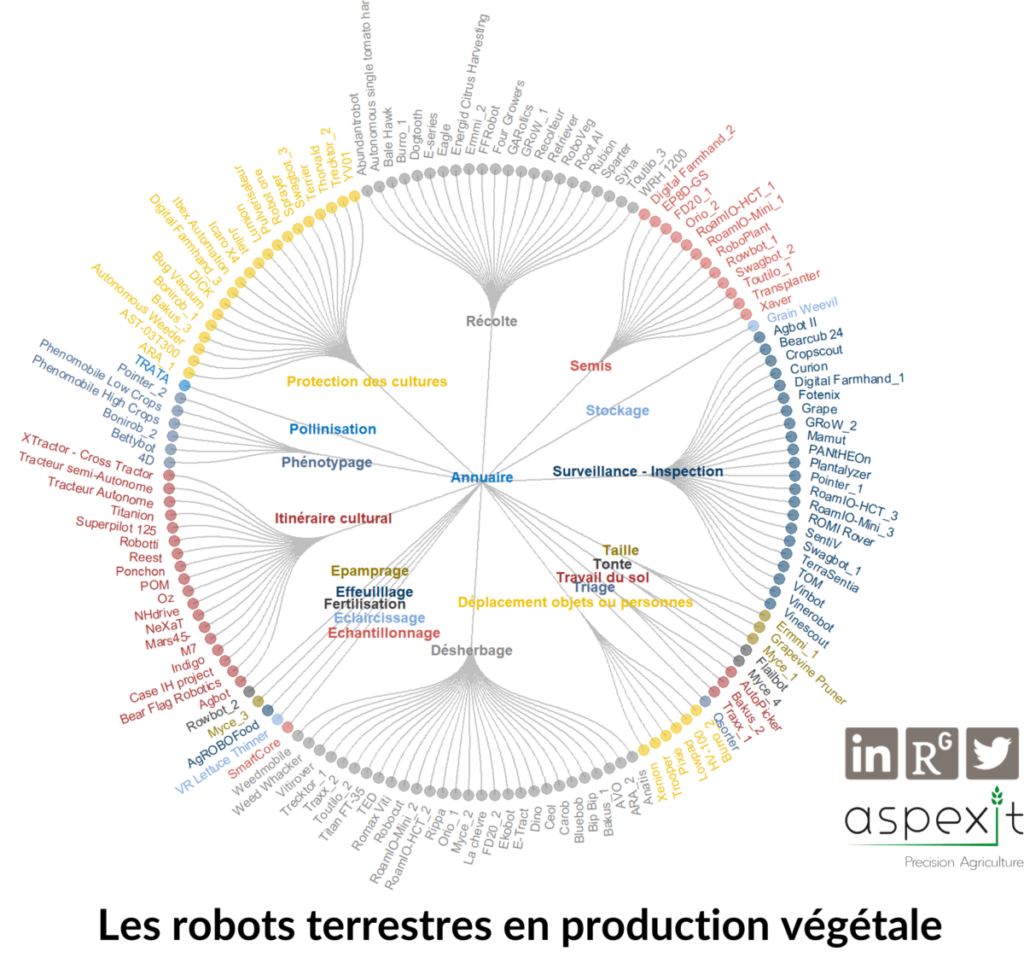
Figure 2. Panorama des robots terrestres en production végétale. Source : Annuaire des outils numériques des agriculteurs
Des robots sont désignés dans le monde entier (Figure 3 – il y a certainement un biais quant au référencement des robots au vu de ma vision française et occidentalisée de la chose). Et les acteurs sont variés (je vous renvoie vers un début de cartographie des roboticiens en Europe réalisée par les étudiants d’UnilaSalle en 2022).
Bien que la définition des systèmes robotisés soit encore débattue pour des raisons de mobilité, de degré d’autonomie, de capacité d’apprentissage, d’étendue de la prise de décision ou encore de la capacité à pré-programmer le robot, nous avons considéré ici les robots dans une acception assez large. Les robots représentés ici sont des systèmes mécatroniques capables de réaliser des tâches de façon assez autonome (nous verrons que l’autonomie complète n’existe pas vraiment) sous supervision humaine (en collaboration ou pas) pour des applications dans des contextes végétaux et animaux.
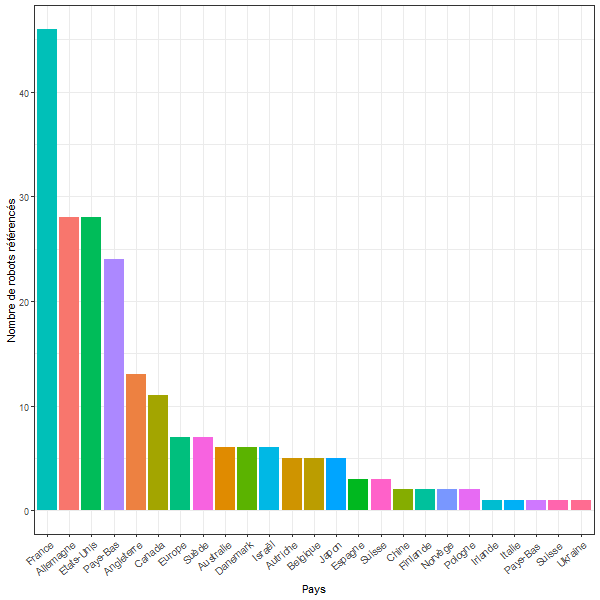
Figure 3. Nombre de modèles de robots référencés par pays sur la plateforme. A ne pas confondre avec le nombre de robots vendus (données non disponibles). Source : Annuaire des outils numériques des agriculteurs
Un focus sur la production animale
Difficile de s’intéresser à la filière robotique dans son ensemble tant les ventes de robots actuels sont déséquilibrées entre les productions végétales et animales. En contexte animal, le modèle économique semble plutôt clair, éprouvé et a l’air de fonctionner. C’est un investissement important pour l’éleveur, mais une bonne partie d’entre eux s’y accultureront plutôt bien et profiteront de la flexibilité, l’agilité et du confort offert par les unités robotisées. En élevage, les systèmes robotiques ont une plutôt bonne implantation parce que ce sont des unités qui n’intègrent finalement pas beaucoup d’intelligence (robots de traite, d’alimentation, paillage, raclage du lisier…) et qui permettent principalement de diminuer la pénibilité du travail et de ré-organiser son temps. Les exploitations familiales d’élevage ont d’ailleurs tendance à s’intéresser aux robots de traite pour pouvoir justement plus facilement allier vie de famille et travail.
Les robots de traite sont les systèmes autonomes les plus vendus (l’observatoire des usages de l’agriculture numérique donne en 2018 le chiffre de plus de 10.000 unités vendues – Lachia, 2018). Ils peuvent être vus comme un service d’accompagnement ou un service de gestion de troupeau dans le sens où il y a un suivi des attentes du contrôle laitier et de la génétique. Certains éleveurs préfèreront revenir sur leur pas après avoir essayé ces robots pour tout un tas de bonnes ou mauvaises raisons, mais l’image générale des utilisateurs semble positive avec une innovation qui a l’air de vivre sa vie. Les références commencent à être historisées et solides. On connait effectivement le nombre de vaches optimal et la production laitière nécessaire pour rentabiliser l’installation du robot, et la filière animale a du recul sur la façon d’installer ces robots.
De façon assez surprenante pour certains, les robots de traite ne permettent pas de répondre à des enjeux d’économie d’échelle. L’imaginaire des fermes toujours plus grandes et simplifiées pour gagner en performance avec des systèmes de traites robotisées dans tous les sens est en fait assez loin de la réalité. Le nombre optimal de vaches par robot de traite tournerait plutôt autour de 60-70 vaches (les petites exploitations laitières auraient donc tendance à augmenter leur cheptel pour arriver à ce chiffre si elles investissaient dans un robot de traite) mais il y aurait un seuil de cheptel au-delà duquel les robots de traite n’auraient plus vraiment d’intérêt (même en multipliant le nombre de robots de traite) parce qu’ils imposeraient un changement d’organisation trop important (en termes de gestion RH des salariés et d’organisation des équipes pour les roulements et les week-end). Les gigantesques fermes laitières ne sont pas si robotisées que ça (pour la traite en tout cas) et maintiennent des systèmes de rotolactors (sorte de manège tournant) assez classiques qui eux, au contraire, sont adaptés aux économies d’échelle (on peut y mettre beaucoup plus de vaches). Le constat principal est donc bien la non-linéarité entre la taille des exploitations d’élevage et le nombre de robots de traite utilisés.
Les réseaux de distribution sont de plus en plus structurés avec des stratégies de vente différentes en fonction des territoires, alternant les messages entre les coûts de production, la rentabilité de l’installation, ou encore la qualité du lait, et offrant des services de tarification autour du nombre de litres de lait traits ou du nombre de branchements (Martin et al., 2020, 2021). L’organisation actuelle reste encore principalement autour d’un robot de traite en bâtiment avec des vaches en stabulation. Et l’on peut espérer que les modèles économiques évolueront pour s’adapter à des modèles de mise au vert avec du pâturage majoritaire et des systèmes robotisés à l’extérieur des bâtiments d’élevage.
En élevage, les robots sont bien mieux implantés sur la filière bovine (et particulièrement laitière) que sur les autres filières (Figure 5). La filière bovine est effectivement plus largement développée en termes d’effectifs et de production financière. Même si d’autres filières sont capables d’assurer un revenu peut-être supérieur aux vaches laitières (on peut penser à la filière caprin lait), la filière bovine est très étendue (avec beaucoup de pays producteurs), les vaches produisent une quantité supérieure de lait, et les animaux plus gros et moins agiles permettent aux robots de travailler plus simplement.
Le reste des robots d’élevage peine néanmoins à se développer fortement. Si les petits robots de nettoyage semblent encore rester à un prix abordable, le prix des robots d’alimentation (les distributeurs automatiques de concentrés par exemple) se rapproche de celui des robots de traite mais le retour sur investissement d’un tel dispositif n’est peut-être pas autant justifiable. Rajoutons à cela que même si les robots d’alimentation sont capables d’individualiser les rations alimentaires de concentrés, ils ne permettent pas encore d’individualiser le régime entier des animaux – notamment lorsque l’on commence à considérer les fourrages.
Un focus sur la production végétale
En production végétale, l’orientation principale des robots semble s’être tournée vers celle d’une économie de main d’œuvre avec une logique d’automatiser les tâches agricoles existantes ou de les rendre plus efficace. Gardez en tête que ce modèle pourrait être mis à mal si la réglementation impose la présence d’un opérateur pour superviser les robots (nous en reparlerons un peu plus loin). Comme tout secteur qui émerge et qui se cherche encore, la filière robotique a choisi des entrées assez simples dont une principale autour de la substitution du désherbage chimique sur le rang (Figure 4) parce que les contraintes réglementaires autour de la réduction de l’usage de produits phytosanitaires vont grandissants et que les besoins en main d’œuvre sont un enjeu de taille pour plusieurs pans de filières agricoles.
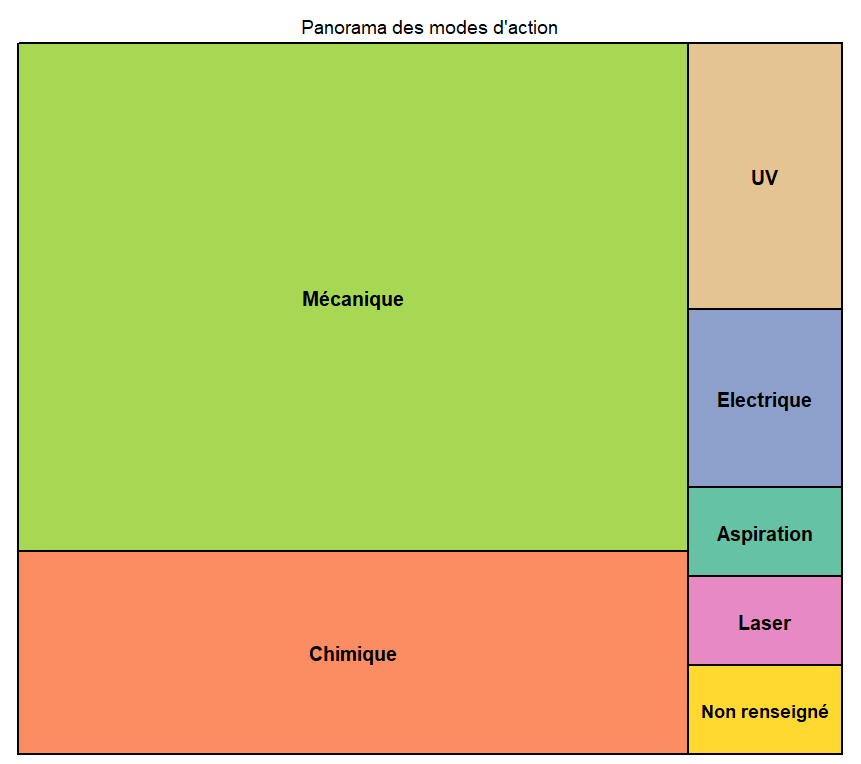
Figure 4. Panorama des modes d’action des robots en protection des cultures. La taille des boites représente la proportion de robots utilisant ce mode d’action. Source : Annuaire des outils numériques des agriculteurs
Tout comme la distinction entre production animale et végétale est nécessaire, il y a ici encore du sens à s’intéresser aux filières végétales avec des prismes de vue différents (Figure 5).
En maraichage, les roboticiens s’attèlent principalement aux problématiques de main d’œuvre et de pénibilité par répétition des tâches agricoles (et ce d’autant plus si l’on parle de substitution chimique et/ou de passage au bio qui demanderont des passages encore plus réguliers dans les parcelles). Certaines activités ne sont même de toute façon pas réalisables avec un agro-équipement classique comme par exemple la récolte des asperges qui demande de détecter les pointes et de suivre la pousse pour couper au bon endroit, et qui impose ainsi une récolte manuelle ou robotisée.
Les propositions robotiques en arboriculture sont encore assez peu développées parce que l’environnement de travail est rendu compliqué par des architectures végétales variées, pas toujours homogènes au sein d’une même verger et avec des obstacles qui peuvent gêner la navigation ou la vision des robots.
En viticulture, le développement des robots est assez important. Les roboticiens ont peut-être plutôt tendance ici à mettre des arguments marketing en avant – avec des vins encore plus « écologiques » et avec moins de produits phytosanitaires. Le développement dans la filière est principalement porté par les grandes maisons viticoles qui ont les moyens d’accompagner ou d’acheter des outils robotiques. En viticulture et en arboriculture, ce n’est pas tant le prix des produits phytosanitaires (finalement assez bas par rapport aux charges totales de l’exploitation) qui pousse les agriculteurs à s’intéresser au sujet mais bien le fait que les professionnels ont compris que les produits chimiques, notamment pour le désherbage, seront peut-être bientôt proscrits d’usage. La question se pose pour les petites exploitations viticoles (quelques hectares ou dizaines d’hectares) qui auront du mal à substituer leurs produits chimiques sans accompagnement financier. Changer de mode de désherbage – que ce soit en passant par un robot ou non d’ailleurs – leur demandera d’acheter une nouvelle machine (robot ou tracteur) qu’ils ne seront pas sûrs de pouvoir amortir sur des petites parcelles.
Les robots commencent à intéresser également les filières porte-graines avec la volonté des organismes multiplicateurs de semences d’atteindre une pureté d’espèces qui réponde aux normes. Les robots sont également développés dans des contextes sous serres (serres verticales, horizontales), là où les environnements sont généralement assez structurés et où la production est assez standardisée (les plantes sont plutôt adaptées à la manipulation robotisée). La navigation entre les rangs est relativement plus facile et les infrastructures sous serres sont souvent une aide au déplacement des unités robotisées (pont roulant, tiges, arches…). La logique d’automatisation sous serre est plus ou moins poussée et répond généralement à des attentes de la population en termes réglementaires (produits biologiques).
En grandes cultures, il n’y a finalement pas trop de robots opérationnels parce que les itinéraires culturaux sont encore très mécanisés (la figure 5 montre néanmoins que les roboticiens s’y intéressent, que ce soit en développant des tracteurs autonomes ou des robots porte-outils). Les environnements sont beaucoup plus ouverts, et les sols ne sont pas forcément toujours aussi meubles et/ou fins qu’en maraichage. L’utilisation de robots pour des tâches spécifiques en grandes cultures pose question au regard de la diversité des cultures et des modes de conduite (parfois même différents entre deux années consécutives sur la même exploitation). Les propositions semblent plutôt se tourner vers des porte-outils modulaires sur lesquels il sera possible de venir atteler les outils déjà présents à la ferme (avec des accroches standard 3 points comme sur des tracteurs). Certains constructeurs s’orientent aussi vers des tracteurs autonomes, sans cabines, avec juste l’intelligence du guidage, sur lesquels chacun viendra encore une fois atteler ses outils d’intérêt. Certaines tâches seront peut-être de toute façon compliquées à automatiser, pour des raisons de liens à la terre et au travail – on peut penser au semis ou à la récolte, qui restent encore beaucoup à la sensibilité de l’agriculteur et à la connaissance de son exploitation.
Toutes filières confondues, on observe très largement des robots se développer pour des applications de surveillance et d’inspection des parcelles agricoles (présence d’insectes, détection de tâches foliaires, repérage d’adventices, détection de départ de foyers d’infestation, estimations de rendement…) avec des systèmes autonomes embarquant des outils de suivi (caméras visibles, caméras multispectrales…). Ces robots sont parfois dédiés à la surveillance ou profitent de leurs passages dans les parcelles pour rajouter cette fonctionnalité.
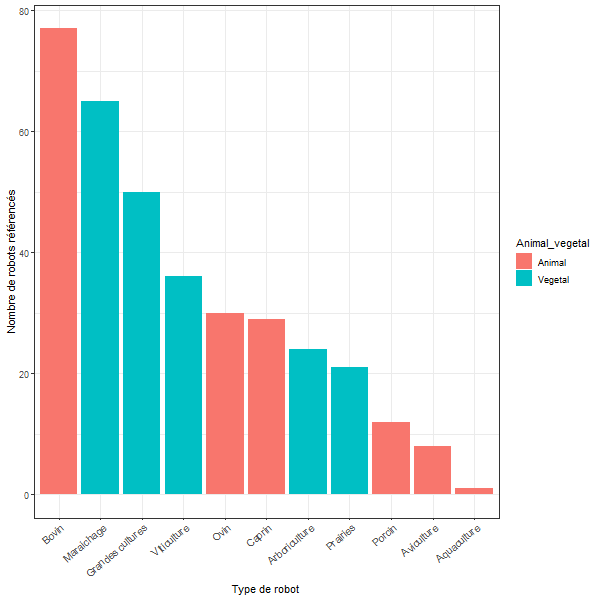
Figure 5. Panorama des robots par filière. ATTENTION : la figure est très théorique parce que certains robots sont mis en avant comme étant capables de travailler sur certaines filières mais cela n’a pas été forcément démontré. Source : Annuaire des outils numériques des agriculteurs
Une entrée plus technique de la robotique
Les grandes typologies de machines robotisées
L’entrée dans la filière robotique par un prisme technologique (Figure 6). permet d’observer plusieurs voies de développement des robots :
- Les propositions de tracteur autonomes semblent plutôt être là pour limiter les problèmes de main d’œuvre mais ne proposent pas de changement de modèle agricole. Les outils actifs sont attelés au tracteur qui est commandé manuellement ou qui travaille de manière autonome.
- Les contraintes réglementaires dont on a parlé poussent à un changement de paradigme où l’on va chercher à produire différemment plutôt qu’à automatiser des tâches existantes (certains n’y verront pas vraiment un changement de paradigme, c’est un autre sujet de débat). Dans ce cas-là, les robots remplissent souvent une fonction assez spécifique (désherbage, pulvérisation, tonte..) et permettront principalement de réduire ou d’arrêter l’usage de produits phytosanitaires.
- La filière robotique propose aussi des porte outils dont l’objectif est de monter la multifonctionnalité des robots en leur donnant la capacité d’être présent sur de nombreuses activités agricoles (désherbage, rognage, travail du sol). Ces porte-outils se rapprochent de la notion de tracteur autonome mais sont vraiment imaginés pour s’adapter à des outils différents et sont surtout plus légers que les tracteurs autonomes.
- Certains acteurs de l’écosystème ne proposent pas des outils robotiques en tant que tel mais plutôt des outils embarqués qui vont permettre d’automatiser des tâches (caméras embarquées à l’avant d’un tracteur pour automatiser une action de binage ou de pulvérisation à l’arrière du tracteur).
- On retrouvera également des outils de cobotique ou de coopération humain-robot sous plusieurs formats. L’opérateur humain complète les capacités de détection automatique du robot à navigation autonome en effectuant une vérification et des corrections supplémentaires des perceptions du robot. Le robot peut également agir comme un assistant pour alléger la charge de tâches ardues et éventuellement dangereuses (robots suiveurs par exemple) ou pour reproduire une opération en parallèle à celle d’un opérateur présent sur le terrain (récolte, pulvérisation…). L’opérateur peut aussi être installé sur le robot pour accomplir des tâches de manipulation coopérative (récolte allongée sur le robot).
- Des approches encore jeunes de coopération entre robots (ou essaim de robots) commencent à voir le jour, soit simplement entre plusieurs robots terrestres (pour réaliser des tâches uniques à plusieurs ou pour se combiner pour des tâches plus complexes comme le transport de charges lourdes), entre des robots terrestres et des robots aériens (drones principalement) ou entre plusieurs bras robotisés sur le même vecteur mobile. On peut alors observer des approches leader-suiveur, avec des communications inter-robots coordonnant les mouvements en fonction de l’état d’avancement (un peu comme dans le cas d’un robot suivant un humain sauf que l’humain est ici un robot ou un tracteur principal)
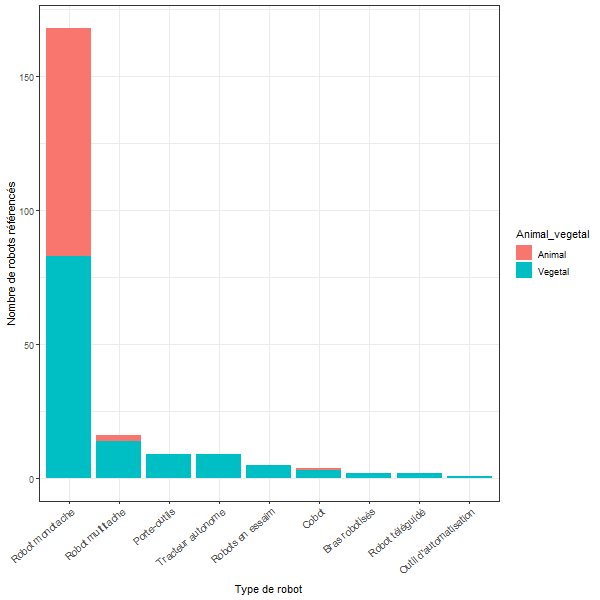
Figure 6. Panorama des orientations technologiques de robots. Source : Annuaire des outils numériques des agriculteurs
Les tâches agricoles restent encore complexes à réaliser pour les robots
Les robots ont pour l’instant encore du mal à travailler dans des environnements non standardisés. En France, la très grande majorité des robots vendus sont des robots de traite (Lachia, 2018) et ces robots sont fixes – ce sont les vaches qui se déplacent. En étant tatillon sur la définition de la robotique agricole, on pourrait d’ailleurs questionner la terminologie de « robots » pour ces dispositifs de traite. De manière générale, les robots sont effectivement plus à l’aise dans des topographies assez peu accidentées et peu pentues, avec des matériels végétaux bien entretenus, et avec des conditions climatiques relativement généreuses (bon ensoleillement, peu de poussière, pas de pluie…). C’est aussi une des raisons pour lesquelles de nombreux roboticiens se sont concentrés sur des cultures spécialisées souvent en lignes (où l’on distingue bien les rangs, les inter-rangs, et les intra-rangs) et sur certaines tâches agricoles plutôt que d’autres, à savoir le travail du sol ou encore le désherbage.
Lorsque ces conditions ne sont pas réunies, les interventions des machines robotisées sont tout de suite moins efficaces. Il faut avouer que les difficultés sont nombreuses. Les robots ont déjà besoin de se repérer dans des environnements végétaux complexes en continuelle évolution au cours de la saison. Les technologies de vision et de reconnaissance d’images ont longtemps patiné parce que les réponses n’étaient pas satisfaisantes. Avec la révolution de la vision artificielle et notamment des réseaux neuronaux (pour les lecteurs intéressés, je vous renvoie vers des précédents articles de blog) à partir de 2012, les espoirs de pouvoir automatiser les tâches agricoles à l’aide de robots et de ressortir les projets des cartons sont réapparus. Ces espoirs ne sont néanmoins confrontés à une réalité douloureuse : les problèmes de perception en agriculture, c’est-à-dire la capacité du robot à se représenter le monde alentour, sont très complexes, variables et difficiles à maitriser.
En cultures pérennes, les feuilles et les branches peuvent venir gêner les capacités de détection des robots en occultant les objets à observer (fruits, feuilles…). Les tâches de maladies ou carence potentiellement observables dans un environnement bien contrôlé en laboratoire seront peut-être à peine distinguables sur les images, soit par leur taille – parfois millimétriques, soit parce qu’ils demanderont d’être particulièrement bien identifiables pour éviter des contraintes de discrétion dans les images. Gardez en tête que lorsque les symptômes visuels apparaissent – même s’ils sont détectés par les images – c’est qu’il est parfois déjà trop tard. Rajoutons d’ailleurs que la détection précoce de maladies, notamment par imagerie hyperspectrale (en utilisant énormément de longueurs d’onde) semble être tombée dans un puits de désillusion dans la mesure où de nombreuses maladies génèrent les mêmes effets de stress sur la plante (il est donc difficile de les distinguer) et qu’une fois encore, lorsque les symptômes sont visibles, c’est parfois que le phénomène à observer à déjà explosé et ne peut plus être arrêté. Certains acteurs se seront d’ailleurs reconcentrés plutôt sur de l’imagerie à très haute résolution spatiale, plutôt que spectrale, considérant que la vision humaine, en beaucoup plus résolue, reste la meilleure manière de réaliser des observations.
Les phénomènes d’ombrage, de soleil rasant ou encore de sur-exposition génèrent un nombre incalculable d’artefacts sur les images que le robot n’a pas appris à considérer. La poussière, la pluie ou encore le brouillard diminueront la qualité des images. La rugosité, pierrosité ou encore topographie du terrain vont affecter la stabilité du robot et créer des vibrations qui engendreront des biais dans la qualité des images. La diversité des formes et des couleurs de fruits au sein d’un même environnement végétal (fruits biscornus, plats, ronds ou plus ou moins murs) rendra d’autant plus complexe la discrimination des fruits prêts à être récoltés. La distinction des adventices au sein des parcelles (par exemple de datura) sera peut-être plus facile à certains stades de développement qu’à d’autres.
Ces problèmes de perception demandent de disposer d’un nombre gigantesque de banques d’images bien labellisées pour que le robot puisse apprendre à reconnaitre ce qu’on lui demande de reconnaitre. Entre les multiples configurations environnementales, entretien des cultures ou encore pratiques culturales, vous imaginez bien que quelques images ne suffisent pas à représenter la diversité des points de vue que le robot pourra avoir au champ. Il faut ici comprendre la difficulté à généraliser les algorithmes de vision et de reconnaissance en agriculture. En imagerie, les travaux scientifiques sont publiés dès lors que des algorithmes semblent fonctionner sur quelques centaines d’images. Les travaux souffrent néanmoins d’un passage à l’échelle délicat à partir du moment où il faut considérer des contextes agricoles plus larges (petite région agricole, différents terroirs et pratiques…). Labelliser des images est extrêmement chronophage (et donc couteux pour un industriel) même en utilisant des outils ou logiciels d’appui mélangeant des algorithmes supervisés et non supervisés. Des travaux sont en cours pour s’affranchir de ces bases de données et de l’apprentissage en passant sur des méthodes dites « non supervisées » mais, au vu de la performance actuelle de la vision en conditions supervisées, on peut raisonnablement se demander comment le robot sera capable de s’en sortir tout seul. D’autres recherchent se concentrent sur la construction d’environnements simulés ou de « modèles du monde » (parcelles agricoles et environnements non structurés artificiels…) dans lesquels des simulations matérielles pourraient être réalisées en boucle. Vous entendrez certainement parler aussi de jumeaux numériques. Il reste quand même à questionner le capacité de ces dispositifs à capturer la variabilité que l’on peut observer sur le terrain.
Ces notions de vision et de reconnaissance sont au cœur des enjeux de la robotique au fur et à mesure qu’il sera décidé que les robots soient capables de faire des gestes précis, proches de ceux des humains et des machines conventionnelles. La manipulation du végétal, notamment pour les enjeux de cueillette et de prélèvement, imposent aux robots d’avoir des gestes extrêmement précis pour ne pas endommager les fruits/semences/légumes à récolter (meurtrissures, points de contact) et une solide capacité de préhension pour pouvoir réaliser autant de tâches qui pourraient paraitre simples à un humain comme tourner un fruit, couper un pédoncule ou encore remplir un pallox de fruits (les convoyeurs sur les robots sont encore parfois trop brutaux pour les fruits). La vision du robot devra être qualitative pour distinguer deux fruits d’aspect différents de façon à ne cueillir qu’un fruit sur les deux et d’éviter de choquer le second s’il n’est pas mûr. De manière générale, les chocs dans l’environnement végétal peuvent conduire à faire tomber pas mal de fruits et engendrer des pertes de rendement (par exemple dans le cas de robots de récolte à aspiration qui seraient trop violents ou de robots qui toucheraient trop régulièrement le végétal). Notez que les enjeux ne sont néanmoins par les mêmes entre des fruits frais et des fruits transformés. Les bras des robots se doivent d’être extrêmement mobiles pour travailler dans plusieurs axes différents (inclinés, parallèle au végétal…). La multiplication de bras robotisés, chacun réalisant une tâche, reste certes une possibilité mais risquera d’augmenter proportionnellement le coût des unités robotiques.
Rajoutons également toute la complexité du guidage du robot à l’intérieur de ces environnementaux complexes (Figure 7). Si la vision par caméra reste une aide à la navigation robotique, les technologies de géo-positionnement restent le choix principal des acteurs du secteur, les caméras et/ou Lidar étant plutôt utilisés pour la détection d’obstacles ou pour mettre le robot en sécurité en cas de présence humaine et/ou animale. Les signaux de géo-positionnement peuvent être très largement affectés par les infrastructures végétales en place, avec par exemple des phénomènes de signaux réfléchis (je vous renvoie vers un autre article de blog pour parler de géopositionnement) et/ou une couverture satellitaire bloquée. Et la résultante est d’autant plus préoccupante que la précision de géolocalisation doit être fine. Dans les environnements 3D non structurés, certaines limites du positionnement GNSS ou RTK pourront être réduites en combinant les technologies de géo-positionnement avec des outils de vision (caméra RGB, caméra 3D…).
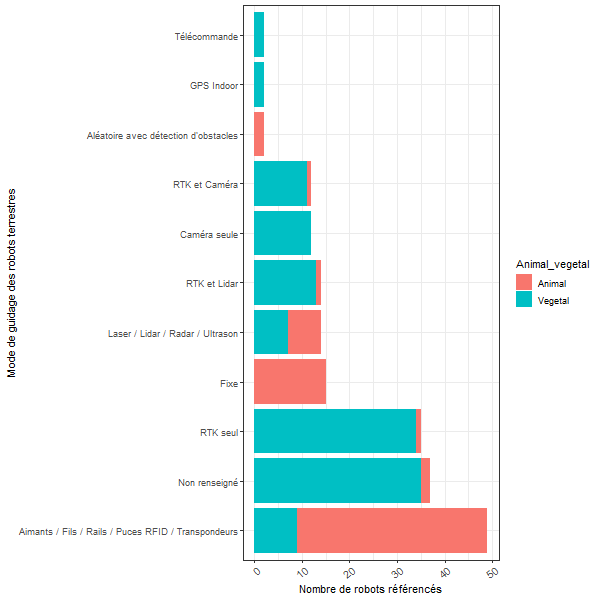
Figure 7. Panorama des robots par mode de guidage. Source : Annuaire des outils numériques des agriculteurs
L’intégration de robots dans les champs demandera d’être capable d’évaluer avec précision les performances des robots, certainement en découpant les tâches à réaliser. Qu’est ce qui relève de la bonne reconnaissance ? Qu’est ce qui relève de la bonne action ? Il faudra également s’assurer de la reproductibilité des tâches agricoles robotisées dans des conditions environnementales variées – pente, poussière… – et nous avons dans ce dossier explicité que la tâche était relativement hardue. Il sera difficile pour le robot d’atteindre des niveaux de performance vraiment égaux aux humains, surtout pour les tâches complexes mais il faudra nous demander s’il y a vraiment un problème à cela. Il restera néanmoins à définir des niveaux de tolérance pour évaluer à quel moment ces plus faibles performances resteront économiquement et/ou écologiquement fiables. Rajoutons que l’évaluation des performances d’un robot sera également difficile à transposer entre différents pays tant les moyens de travail (modes de conduite, organisation du travail…) peuvent être différents.
Certains discours sont peut-être encore trop optimistes sur l’évolution de ces enjeux technologiques. Je ne dis pas ici que ces verrous ne seront jamais levés mais qu’un peu de pragmatisme et de réalisme sont de rigueur. L’asymptote de maturité de ces robots n’a pas encore été trouvée. Les verrous technologiques sont nombreux :
- Le développement de comportements élémentaires permettra aux machines robotisées d’être encore plus autonomes. Il faut comprendre que les robots devront être capables de changer tout seul leur type de comportement sensoriel et moteur, c’est-à-dire qu’en fonction du contexte et de la tâche à réaliser, le comportement du robot devra être en mesure de s’adapter. Entre le suivi de trajectoire par GPS, le suivi d’une empreinte au sol, le suivi d’une personne par laser ou Lidar ou encore le suivi d’une structure déjà installée, le robot devra être capable de changer son mode de fonctionnement pour s’adapter aux contraintes du moment et à sa mission.
- La modularité des robots et leur capacité à réaliser plusieurs tâches permettra d’augmenter leur taux d’utilisation au champ et d’être plus largement mutualisé. Cette modularité facilitera aussi la coordination entre plusieurs robots mais pose de nombreux enjeux sur les manières de synchroniser et d’associer des robots pour réaliser des tâches en commun
Taille des robots et débits de chantier
L’approche des machines en agriculture a globalement toujours tourné autour d’une course au gigantisme, avec des parcellaires toujours plus grands et des outils toujours plus larges pour optimiser les charges et les temps de travaux. Même si la robotique pourrait encore pousser cette logique à l’extrême (nous en rediscuterons), la majeure partie des roboticiens ont quand même tendance à reconsidérer la taille des systèmes robotisés et à proposer des unités (beaucoup) plus petites que leurs cousines conventionnelles.
Les robots de petite taille sont intéressants à plusieurs égards. Ils permettent déjà de réduire le tassement du sol parce qu’ils sont plus légers et l’on pourrait imaginer que cette diminution de taille permette d’éviter de perdre du rendement par un sol simplement trop tassé (est ce que ce gain d’argent pourrait contrebalancer le coût d’un opérateur de supervision des robots ?). Le fait de travailler avec des petits robots facilite l’aménagement de mécanismes électriques pour propulser les robots et va ainsi de pair avec les besoins de décarboner les activités agricoles. Des petits robots permettront des rotations rapides entre les unités de travail, avec des interventions ponctuelles et fines, et les recharges de robots seront plus rapide ce qui permettra d’avoir toujours des unités actives dans la journée. En cas de problème de semis, le ré-ensemencement sera envisageable dans le sens où les équipements conventionnels trop lourds et peu flexibles endommageraient trop la culture en cours de croissance. La miniaturisation portée par la robotisation est une vraie valeur mais elle a ses limites. La capacité des robots à travailler est contrainte par leur enveloppe poids-puissance – il faut ici y comprendre qu’en diminuant la taille des robots, on diminue aussi leur capacité à réaliser des tâches qui demandent de la puissance – comme par exemple pour le travail du sol.
Plusieurs études scientifiques tendent d’ailleurs à montrer que les machines autonomes permettraient à un agriculteur d’atteindre des coûts de production minimums à une plus petite échelle que ne le ferait un équipement conventionnel. La capacité d’atteindre de faibles coûts de production à des tailles d’exploitation relativement petites, et avec un investissement en équipement modeste, signifie que la pression exercée sur les entreprises agricoles pour qu’elles recherchent continuellement des économies d’échelle pourrait enfin être mise de côté (Lowenberg-DeBoer et al., 2021). Les coûts d’investissements en système robotisés pourraient même être largement diminués si de petits robots agricoles sont utilisés très intensivement. En allant plus loin, on pourrait donc imaginer que des petits robots pourraient presque éliminer l’avantage concurrentiel dont bénéficient les grands champs rectangulaires du modèle agricole dominant.
Les débits de chantiers des robots actuels sont plus faibles que ceux des machines conventionnelles pilotées par un opérateur. Mais est-ce vraiment si grave que ça ? Tout dépendrait de là où on se place. Le tracteur classique a principalement été positionné avec un objectif de maximisation de la rentabilité horaire à un moment où les objectifs de performance n’étaient très certainement plus ceux d’aujourd’hui. Il devient maintenant plutôt nécessaire de trouver des compromis entre l’agilité des robots, la diversité des conditions culturales, ou encore le maintien de l’état du sol.
D’un point de vue plus opérationnel, certaines tâches agricoles n’ont pas fondamentalement besoin d’être réalisées rapidement. Le désherbage peut par exemple être réalisé en plusieurs jours, si tant est que ça ne laisse pas le temps aux adventices de monter en graine et que, de manière plus générale, les stades de développement des cultures et des adventices soient proprement considérés. Sur les cultures pérennes – comme la vigne – il sera nécessaire de considérer aussi que tous les désherbages ne se valent pas. Le désherbage sur le rang est par exemple beaucoup plus lent que le désherbage entre les rangs de vigne, et il sera nécessaire de repasser plus de fois pour désherber dans les rangs qu’entre les rangs au cours du cycle cultural. En période de flux tendu – comme dans un contexte de récolte par exemple – la question du débit de chantier pourrait être bien plus préoccupante.
Des modèles économiques variés
Les robots coûtent chers – plusieurs dizaines voire centaines de milliers d’euros, et les systèmes robotisés seuls doivent parfois être complémentés par d’autres infrastructures, augmentant leur prix d’autant plus. On peut par exemple prendre le coût d’un bras robotisé pour la récolte auquel il faudra rajouter une plateforme d’autoguidage, le développement du logiciel dé détection, le préhenseur ou encore l’architecture mobile. Et je ne parle même pas ici du coût de l’assurance des équipements autonomes qui, s’il s’avère élevé, pourrait clairement jouer dans la balance (les assureurs commencent d’ailleurs à se ré-intéresser au sujet de la robotique). L’amortissement de ces robots s’est concentré sur les forts besoins en main d’œuvre et on ne sera donc pas surpris qu’une grande partie des robots en production végétale – souvent monotaches – soient dédiées à des activités comme le désherbage pour des cultures à forte valeur ajoutée. Certains tests au champ auraient montré qu’un désherbage mécanique régulier en maraichage pourrait conduire à des hausses de rendement grâce à une efficacité de désherbage de plus en plus importante (à creuser donc…). En revanche, pour imaginer atteindre des économies d’échelle et diminuer le prix des robots (et avoir des pièces détachées…), il sera nécessaire de toucher de (très) grandes surfaces et d’être alors capables de travailler sur d’autres systèmes de production, notamment les grandes cultures.
Notez également qu’avec les problèmes d’approvisionnement actuels et les pénuries en matière première, les constructeurs doivent parfois passer des commandes importantes et garder des stocks pour éviter d’avoir des coûts variables trop lourds. Certaines branches de la robotique commencent quand même à s’orienter vers des aspects low-cost avec la volonté d’utiliser des structures mécaniques et des capteurs peu couteuses (ex : smartphone branché sur une structure modulaire pour guider le robot via une application smartphone, bras robotisés ou flotte de robots avec des degrés de mobilité différents…)
Au vu du nombre de robots vendus en production végétale (quelques centaines), on peut difficilement croire que les entreprises de la robotique soient rentables. Ces structures semblent plutôt vivre sur leur trésorerie et sont subventionnés par tous un tas de fonds dédiés à l’innovation (européens, français), d’investissements privés, et potentiellement de prêts bancaires. Le plan de relance français pourrait lui aussi être mis à contribution avec un grand défi robotique qui, s’il est accepté, pourrait orienter une vingtaine de millions d’euros tout azimuth vers la filière agricole depuis l’innovation jusqu’à des challenges et des démonstrateurs. Le développement de robots et leur potentielle adoption prend de toute façon du temps et les investissements dans la filière sont réalisés sur du long terme. On peut d’ailleurs observer que certains projets robotiques s’arrêtent ou s’éteignent dès lors qu’ils n’ont plus de financement. Les acteurs de la robotique sont assez variés. On pourra retrouver :
- Des fournisseurs de technologie, déjà établis dans d’autres industries (avec donc leur propre système de navigation, de contrôle, et capteurs) et qui ont identifié l’agriculture comme un domaine attractif.
- Des start-up, principalement à orientation technologique, et qui arrivent sur le marché avec des robots spécialisés souvent de petite taille ou des technologies à adapter sur les robots.
- Des fabricants de machines agricoles, avec une longue tradition d’ingénierie mécanique, plus ou moins avancés sur les systèmes robotiques. Ces acteurs font généralement soit évoluer leurs machines automatisées vers des systèmes autonomes (avec par exemple des systèmes de rétrofit), soit développer de nouveaux systèmes robotisés en capitalisant sur leurs connaissances des machines traditionnelles. Notez que certains de ces acteurs préféreront racheter des start-up de la robotique pour internaliser ces compétences (ex de John Deere qui a racheté les entreprises Blue River Technology et Bear Flag Robotics). Certains fabricants de machines agricoles robotisées préfèrent se concentrer sur un système robotisé fonctionnel sans aller nécessairement trop loin sur l’intelligence embarquée derrière (adaptation de l’outil aux contraintes du terrain en utilisant des données de fonctionnement machine, utilisation de données de vision…), cette section étant plutôt externalisée chez un partenaire. On peut comprendre qu’avec la diversité des compétences à maitriser ne serait-ce que pour qu’un robot fonctionne (navigation, gestion de l’énergie, attelage d’outils..), des constructeurs n’aient pas envie de se rajouter des compétences en vision ou en analyse de données.
- Des équipementiers qui ne construisent pas de machines agricoles à part entière mais qui développent de l’agro-équipement à venir installer sur les machines agricoles des constructeurs. On pourrait se demander si ces équipementiers ne s’intéressent pas aux robots pour diminuer leur dépendance aux fabricants de machines agricoles en ayant leur propre source de puissance. Ces équipementiers pourront effectivement avoir besoin d’embarquer leur propre ordinateur embarqué et l’intelligence associée et pourraient vouloir disposer de leur propre support mobile
En contexte végétal, les prix des robots étant assez prohibitifs à l’heure actuelle (à ce prix là, les agriculteurs peuvent acheter plusieurs machines agricoles conventionnelles), les constructeurs semblent se tourner principalement vers de la location de robots (même si certains continuent à vendre des systèmes robotisés à l’unité) avec des logiques d’abonnement ou non. Les constructeurs peuvent d’ailleurs louer des robots unitaires ou des flottes de robots. Certains constructeurs commencent à s’orienter également vers une économie de service (ex : la vente d’un hectare de désherbage ou de tonte), service qui pourrait alors avoir plus de sens dans le cadre d’une prestation de travaux ou pour la gestion mutualisée de robots. Les modèles proposés de location et de services ne sont finalement pas si surprenants au regard de la maturité des robots proposés. La majorité des robots reste encore à l’état de test ou de développement (je n’ai ici pas sorti de figures depuis la plateforme des outils numériques parce que les informations sont trop incertaines à ce sujet), et ne sont pas encore assez fiables pour une utilisation autonome par les agriculteurs. Les prototypes ne sont pas encore au point, tombent régulièrement en panne et ne sont pas facilement réparables. Ces modèles en développement permettent aussi aux constructeurs de consolider leurs retours d’expérience sur le terrain. Les constructeurs attendent d’ailleurs des tests réalisés à plus grande échelle, avec l’appui de structures consolidées comme les coopératives. Se pose parfois la question de la disponibilité en matériels robotiques pour que ces structures puissent tester des outils robotisés parfois à peine commercialisés.
L’utilisation de robots autonomes sur les fermes appelle à réfléchir sur des questions intéressantes d’organisation collective et de logistique. Dans la mesure où les robots actuels sont principalement spécifiques à une tâche et au vu du prix actuel des robots, la mutualisation des unités robotiques apparait comme une proposition pertinente. Les robots sont-ils adaptés par exemple à un fonctionnement en CUMA ? Ce seront tout autant de réponses à apporter en termes de partage de travail, de transport des robots (faut-il acheter une remorque dans la CUMA ?), de recharge (sur une borne mobile ou dans le hangar de la CUMA), de responsabilité (un adhérent ou un salarié de la CUMA), de pertinence économique (l’achat du robot en vaut-il la chandelle ?) ou encore de stratégie (faut-il considérer les tracteurs autonomes dans le cadre du renouvellement de parc machines ?). Une des limites actuelles étant néanmoins le manque de référence des CUMA sur ces dispositifs robotisés.
Les premiers robots achetés par des acteurs agricoles sont souvent assez largement subventionnés parce que les aides existantes sont directement fléchées sur de l’achat de systèmes innovants. On pourrait questionner le fait qu’encore peu d’aides soient orientées vers de la prestation de services ou de l’abonnement. En favorisant les aides à l’achat, le système de subvention pousse en quelque sorte à l’endettement et ne prend pas en compte les potentiels achats mutualisés et les taux d’usage qui sont finalement assez faibles si les robots ne sont pas partagés (surtout parce qu’ils sont aussi principalement monotaches).
Comme les panoramas l’ont montré, les propositions des constructeurs sont assez différentes entre des robots monotaches très spécialisés (ça reste la majorité des robots), des robots multitaches, des porte-outils, des systèmes de cobot ou encore des systèmes de robots en coopération. Et les modèles économiques associés des constructeurs sont variés. Certains se positionneront sur un et un seul robot, alors que d’autres auront plutôt une logique de gamme de robots avec des systèmes robotisés s’attelant à différentes tâches au sein de la même filière ou des systèmes s’attelant à la même tâche mais entre des filières différentes. On voit également apparaitre une logique que l’on pourrait appeler de full-liner avec l’idée d’un robot ou d’une flotte de robot qui peut gérer un itinéraire cultural de bout en bout (du semis à la récolte) sans aucune intervention humaine.
Il est surprenant qu’une grande partie des constructeurs de systèmes robotisés n’utilisent pas des architectures standardisées et redéveloppent leurs robots depuis le début. Ne pourrait-on pas imaginer une logique plus industrielle (qui fera baisser les coûts) avec des briques modulaires (vecteur mobile avec roues, batteries..) ? Les entreprises qui développent des services numériques à base de drone utilisent par exemple principalement les drones du marché et ne redéveloppent pas leur propre drone à chaque fois.
Les segments sur lesquels interviennent les robots ne sont pas toujours clairs (même pour les roboticiens) et il y a un manque flagrant de cartographie de la maturité et des segments robotique. Pour quelle culture, variété, stade phénologique, ou encore contexte agricole chaque robot est-il mûr ? Où en est la solution actuellement et jusqu’à où peut-elle aller ? Certains constructeurs pourraient y voir ici un risque de concurrence, surement à tort d’ailleurs, mais cette cartographie permettrait à la filière agricole d’y voir beaucoup plus clair.
De manière générale, puisque les investissements agricoles sont planifiés avec de longues périodes d’amortissement, il est nécessaire de démontrer très pragmatiquement que les solutions robotiques offrent effectivement un rapport coût-bénéfice satisfaisant (ce qui permettra aussi de ne plus dépendre de subventions et d’offrir plus d’indépendance aux acteurs agricoles). La majorité des études de la littérature scientifique ont su trouver des scénarios dans lesquels les technologies d’automatisation et de robotique étaient rentables. Rajoutons quand même que la diversité des résultats concernant les marges, les rendements et la rentabilité ne permet pas de tirer des conclusions générales évidentes. Néanmoins, force est de constater que la plupart de ces études ont seulement considéré les coûts et les revenus directement modifiés par l’introduction de l’automatisation ou de la robotique, en supposant que tout le reste était constant. En simplifiant à outrance, on manque à voir l’implantation du robot dans un sytème agricole beaucoup plus large et ses implications sur autant de paramètres que les changements dans les systèmes de culture, la valeur des données que les robots pourraient recueillir pendant qu’ils effectuent d’autres tâches (même si c’est difficile à mesurer), les impacts régionaux et nationaux sur les marchés, le commerce, ou encore sur la demande de main-d’œuvre (Lowenberg-Boer et al., 2021). Peut-être faut-il également commencer à réfléchir à des modèles économiques qui ne sont pas organisés autour de l’agriculteur ? Pourrait-on imaginer des robots intervenant sur des bandes enherbées dans le cadre de la directive sur la non-exposition des riverains ou sur des dispositifs de végétalisation, avec un modèle économique où le robot ne dépend pas que de l’agriculteur mais par exemple d’un financement territorial local pour protéger de riverains, une zone de captage d’eau ou un site sensible touristique ? Cumulées, ces surfaces sont loin d’être négligeables et pourraient permettre d’atteindre des effets d’échelles de façon assez différente à ce qui est proposé aujourd’hui.
Des enjeux de régulation importants
N’en déplaise à leurs détracteurs, l’utilisation des robots en contexte agricole est encore assez contraignante avec la réglementation actuelle. Le problème est donc moins de savoir comment développer un tracteur sans conducteur (ce n’est finalement pas un problème technique) que de savoir comment le réglementer.
Il n’existe pas de régime réglementaire spécifique pour les robots agricoles ou pour les robots en général. Et l’on pourrait d’ailleurs se demander si un régime réglementaire unique aurait du sens tant les systèmes robotisés sont différents les uns des autres, que ce soient au regard de leurs fonctions, leur niveau d’autonomie ou leur niveau d’interaction homme-machine.
A l’échelle européenne, la réglementation principale qui s’applique pour les machines agricoles est la directives machines 2006/42/CE (qui date donc de 2006). Cette réglementation régit les grands principes de fonctionnement et de sécurité auxquels les constructeurs doivent se conformer avant toute mise sur le marché. Pour respecter ces exigences, les constructeurs appliquent des normes et standards européens et internationaux (EN et ISO), harmonisés avec la réglementation et qui font office de conformité pour leurs machines. Une évolution de cette directive en un « règlement » machine devrait voir le jour courant 2023 pour y intégrer notamment les principales évolutions des systèmes robotisés (systèmes de reconnaissance, robotique, autonomie et déplacement autonome, protection contre les intrusions, cybersécurité…). Une fois le règlement publié, l’ensemble des normes devront être révisées pour prendre en compte ces nouvelles informations.
De l’extérieur, ces travaux réglementaires ont l’impression de patiner un peu. Mais en y creusant de plus près, on se rend compte que certains aspects ne font pas consensus, notamment sur la problématique de la supervision des robots par un opérateur extérieur, et sur le fait que le contexte réglementaire ne s’arrête pas à cette unique directive machines. La question d’un poste de supervision obligatoire est cruciale pour le secteur. L’imposer reviendrait déjà à revenir sur un certain nombre de choses pour des robots déjà largement utilisés par la population (par exemple des robots de tonte). La nécessité de présence d’un opérateur extérieur impacterait très significativement les modèles économiques de la filière robotique puisque cet opérateur ne pourrait pas nécessairement réaliser d’autres tâches agricoles à côté du robot. Les acteurs se demandent si la supervision ne pourrait pas être réalisée à distance. Se poseront de toute façon des questions autour de la responsabilité de l’opérateur, pas toujours présent auprès du robot mais légalement garant de la sécurité des opérations. L’opérateur devra être capable de mettre la machine en position de sécurité à tout moment.
Tout le monde craint l’accident (un enfant dans une parcelle, un humain accroupi…) et ces craintes sont légitimes et réelles. Les constructeurs robotiques se sont d’ailleurs rapidement mis d’accord sur le besoin de travailler en commun sur ces sujets de sécurité pour éviter que l’un d’entre eux n’affecte l’image de la filière dans son ensemble. Les acteurs y apportent des contributions collaboratives en termes de sécurité au niveau OCDE et ISO (choix de capteurs pour la détection, approches certifiables d’anticollision, analyse de modes de défaillance types, règles de mises en sécurité, précision de géo-positionnement, maintien de l’intégrité physique et de la contrôlabilité des robots …). Une alternative pourrait être d’installer des clôtures pour empêcher toute interaction involontaire entre le robot et l’homme mais l’on imagine assez mal ce dispositif réaliste d’un point de vue opérationnel (sans compter sur les impacts sur la faune locale et l’investissement supplémentaire pour la mise en place de ces clôtures simplement pour pouvoir utiliser un système robotisé). Les enjeux de sécurité étant primordiaux, on pourrait imaginer le recours à un consensus social sur les risques résiduels liés à l’utilisation de machines automatisées.
Une autre question se pose autour de la vitesse de travail des robots, qui est directement liée au débit de chantier des systèmes robotisées (avec potentiellement le besoin d’être immatriculés si ces systèmes ont vocation à emprunter la voirie, et avec parfois des critères de vitesse maximale de déplacement). Il est donc raisonnable là aussi de se demander comment répondraient les modèles économiques agricoles avec robots à des changements de vitesse de chantier. Une restriction de vitesse pourrait rendre les machines autonomes non compétitives par rapport aux machines agricoles conventionnelles dans les exploitations agricoles mécanisées.
Plusieurs autres règlements viennent aussi se rajouter à la partie. Au niveau européen, la Mother Régulation (règlement UE n°167) s’intéresse aux procédures d’homologation des tracteurs agricoles. A l’heure actuelle, ce règlement ne permet pas une « réception par type », c’est à dire l’apport d’une preuve de conformité du type de tracteur aux réglementations en vigueur par un organisme accrédité (la réception est ici plutôt de l’ordre réglementaire et n’a pas à voir avec la réception d’un tracteur autonome sur son exploitation). On retrouve également des règlements autour de la circulation routière pour les machines qui utilisent nos routes. Ce sont déjà des critères spécifiques pour les machines agricoles automotrices (règlement MAGA) qui ne roulent que dans certaines conditions sur les routes (on peut penser aux moissonneuses batteuses par exemple). On retrouve dans ce réglement plusieurs critères comme par exemple la distance de freinage ou encore la largeur de voie empruntable par la machine automotrice. Pour circuler de façon plus générale sur les routes, c’est bien la réglementation routière et le code de la route qui s’appliquent (de la même façon que pour les véhicules autonomes) et c’est là que le bât blesse. Les systèmes robotisés agricoles peuvent en effet être amenés à traverser des routes pour faire le lien entre deux parcelles proches. Certaines alternatives sont proposées pour adapter la directive machines (par exemple en déplaçant les robots sur une remorque – le transport sur remorque est autorisé par la directive actuelle) pour éviter de s’attaquer à la réglementation routière, au risque néanmoins d’impacter le modèle économique autour du robot. Rajoutons pour terminer que ces règlements se combinent. Une moissonneuse batteuse avec un mode autonome sera par exemple soumis au règlement MAGA et à la directive machines.
Une chose est sûre : La réglementation est à suivre de près tant elle peut complétement transformer l’intérêt ou non d’intégrer des unités robotisées dans les champs.
Impacts de systèmes robotiques en agriculture
Un retour rapide sur les fractures potentielles de la robotique agricole
Les risques de fractures susceptibles d’apparaitre suite au déploiement du numérique et de la robotique sont nombreux. Je vous invite à relire un précédent dossier de blog où j’avais abondamment donné la parole à des auteurs des sciences humaines et sociales sur la question. Sans revenir très largement sur le sujet, vous retrouverez ici quelques fractures non exhaustives détaillées dans le précédent dossier, mais centrées ici sur la robotique :
- « Fracture numérique » : Le développement des outils robotiques pourrait risquer d’accroitre les inégalités d’accès aux outils sur les territoires. On pourrait effectivement craindre le développement de zones blanches où les concessionnaires ne voudraient pas se déployer pour ne pas avoir à gérer des pannes robotiques dans des exploitations agricoles trop isolées. Les roboticiens pourraient être amenés à dimensionner la géographie et la densité de leur maillage sur le territoire, et à contraindre leurs réseaux de distribution par des logiques de transport pour optimiser leurs déplacements et réduire leurs coûts, laissant alors de côté une partie des fermes et leur accès à des unités robotisées. On pourrait rajouter aussi le concept de zones blanches en termes de couverture réseau, qui pourrait limiter les possibilités d’autoguidage dans certaines zones mal couvertes.
- « Fracture de précision » : Les outils robotiques ont pour l’instant principalement mis l’accent sur les cultures à valeur ajoutée, notamment le maraichage et quelques cultures pérennes. Nous faisons référence ici au fait que l’on trouverait d’un côté des cultures industrielles dans un écosystème simplifié, très largement suivies et accompagnées par les outils robotiques, recevant des conseils suffisamment bons et précis et, de l’autre côté, des cultures plus diversifiées, pour lesquelles les outils et conseils seraient de moins bonne qualité et mal adaptés à leurs opérations, et qui ne tireraient que peu de bénéfices de la numérisation en cours.
- « Fracture sociale » : Les unités robotiques vont demander de nouvelles compétences sur le terrain en électronique et en numérique – compétences qui ne seront pas forcément accessibles aux agriculteurs s’ils ne sont pas correctement formés, et qui pourraient privilégier des employés extérieurs au monde agricole. On pourrait effectivement voir se développer le métier de superviseur de robots parce que le paramétrage des robots est très important et peut influer énormément sur la capacité du robot à fonctionner correctement. Cette fracture sociale pourrait être l’occasion de questionner l’idée d’une taxe sur la robotique agricole
- « Fracture Nord-Sud » : Les machines agricoles conventionnelles ont majoritairement participé à l’agrandissement et à la géométrisation des parcellaires agricoles. Les outils robotisés adaptés à des petites surfaces agricoles pourraient être un moyen pour l’agriculture des pays en développement d’éviter les écueils de la mécanisation motorisée. Force est néanmoins de constater que les robots actuels ont principalement été développés dans des contextes occidentalisés et que leur transfert direct dans d’autres contextes ne sera certainement pas adapté.
- « Verrouillage technologique » : dans la droite ligne de la numérisation technologique, il n’est pas impossible que la complexité technique des machines robotisées, le paramétrage des logiciels, ou encore la dépendance aux mises à jour rendent les agriculteurs pieds et poings liés aux roboticiens. On pourra ici rajouter le risque que les acteurs agricoles disposent seulement de licence d’exploitation ou d’utilisation mais n’aient pas la main pour réparer leurs machines autonomes (droit à réparer son outil de travail).
- « Changement d’échelle » : Si l’on imagine que les robots seront capables d’automatiser tous un tas d’activités agricoles, on pourrait s’attendre à ce qu’il n’y ait plus aucune limite à la taille des exploitations dans le sens où le nombre de robots seraient simplement proportionnel à la surface à travailler. En poussant le bouchon à l’extrême, pourrait-on imaginer une ferme France avec une seule personne qui piloterait la totalité de la production ?
- « Sécurité financière des exploitations » : Le montant actuel des robots pose question sur l’accès à ce type de machines et sur le possible endettement que ces systèmes robotisés font peser sur les exploitations agricoles (réparations, maintenances, mises à jour…)
- « Sécurité et Cybersécurité » : les machines autonomes peuvent être responsable d’accidents sur l’homme (soit directement si la machine n’est pas capable de détecter une présence, soit indirectement si une machine autonome traverse une route par exemple). Les attaques sur les unités robotiques sont possibles, que ce soit sur le matériel, les micro-logiciels ou sur les systèmes de communication des robots, avec une possibilité de prise de contrôle des machines autonomes et d’atteinte à la sécurité des humains ou des cultures autour des robots.
- « Standardisation de la production » : En raison de la standardisation des produits alimentaires nécessaire pour faciliter les premières applications des robots, les consommateurs pourraient en venir à s’attendre encore plus fortement à ce que tous les aliments soient parfaits, ce qui pourrait entrainer une augmentation du gaspillage alimentaire puisque moins d’articles seraient jugés propres à la vente.
- « Bien-être animal » : Même si certains auteurs font état d’une co-évolution des animaux et des hommes avec les robots d’élevage (notamment de traite), l’évolution des relations entre l’homme et l’animal peut être soumise à interprétation. Le fait que certaines vaches passent quatre fois par jour à la traite pourrait à la fois vue comme une prise en compte plus fine des besoins des animaux ou comme une résultante de l’augmentation de la productivité agricole (hyperproduction, animaux sélectionnés…). De manière assez perverse, la présence moins importantes de témoins humains autour des activités des robots pourrait favoriser une plus grande tolérance à l’égard des dommages causés aux animaux et donc exacerber les menaces pour le bien-être animal.
Vers une économie de main d’œuvre et une réduction de la pénibilité ?
La réduction de la pénibilité et la réponse au manque de main d’œuvre sont très certainement les deux voies d’entrée principales des acteurs de la robotique. Les unités robotisées impactent directement les conditions de travail dans les exploitations agricoles. Par exemple, la traite robotisée diminue l’astreinte au travail et offre une flexibilité et une plus grande liberté dans les horaires de travail. Le temps de travail effectif n’est pas nécessairement plus faible (et il est parfois augmenté) et, même si certains agriculteurs auront fait un pas en arrière sur les robots de traite, les principaux utilisateurs y auraient trouver une meilleure qualité de vie. L’attente est réelle chez les jeunes agriculteurs de pouvoir se dégager du temps et de la charge mentale, et ce même au prix d’une réduction de leur marge. Cette image est néanmoins peut-être plus véhiculée par des néo-ruraux ayant connu la vie en entreprise avec une organisation plus rationnelle et des charges de travail acceptables, et qui n’ont pas forcément envie de remettre tout ça en cause en arrivant dans les champs. Même si l’argument du gain de temps est parfois avancé par les roboticiens en ce sens que l’autonomie des robots permettrait de dégager du temps sur des tâches chronophages, il faudra s’assurer que les méthodes de mesure du temps de travail évoluent également avec l’arrivée des robots. La charge mentale et la gestion des notifications et alertes des robots, les temps de réparation des unités ou encore les temps à passer pour changer les outils attelés aux robots sont des paramètres à considérer sur une analyse globale du temps de travail.
En production végétale, les conditions de travail des ouvriers sont également susceptibles de s’améliorer si l’on considère que les robots permettent de réduire les charges, diminuer les postures pénibles et limiter les troubles musculo squelettiques (l’exemple de robots sous forme de plateforme avec des opérateurs couchés en est un bon exemple), limiter l’exposition des ouvriers à certains produits dangereux (phytosanitaires par exemple), réduire l’exposition aux vibrations et au bruit, limiter l’accès aux zones de danger (dans les abattoirs par exemple) ou encore limiter les travaux agricoles sous des conditions environnementales difficiles (le travail sous serre en plein été). Il n’y a de toute façon aucune grandeur à se casser le dos, et si la machine robotisée peut apporter une solution, il serait dommageable de ne pas s’y intéresser – quelle que soit la machine proposée (exosquelette, co-botique…).
La problématique du manque de main d’œuvre (saisonnier, tractoriste..) est toujours dangereuse à aborder parce qu’elle est effectivement une réalité du terrain mais parce qu’elle est aussi exacerbée par les modèles agricoles actuels et que l’on pourrait avoir l’impression que les agriculteurs creusent la tombe dans laquelle ils sont déjà installés. Dans les bassins de population de grande densité, et ce même parfois avec des taux de chômage élevés, les agriculteurs peinent à recruter de la main d’œuvre – même sur des postes non qualifiés – soit parce que la population ne veut plus venir y travailler (et les augmentations de salaires n’y changent parfois pas grand-chose) ou parce que les sursauts de reprise économique auront permis à la population d’être embauchée ailleurs. Certaines activités agricoles sont très chronophages et requièrent des besoins en main d’œuvre sur des périodes très concentrées dans le temps (la récolte de certaines productions dure à peine quelques semaines). Le passage à l’agriculture biologique, même s’il est très souhaitable d’un point de vue sanitaire, n’arrange rien à la chose. Les traitements phytosanitaires peuvent être étalés dans le temps alors que le désherbage mécanique demande de repasser beaucoup plus régulièrement, accentuant encore plus le besoin en main d’œuvre. On pourrait néanmoins se dire que les saisonniers et travailleurs temporaires seraient plus à mêmes de revenir en sachant que les tâches pénibles seront réalisées par les robots.
Tentons de prendre un peu de recul
Où allons-nous ?
La majorité des robots qui a été développée se retrouve principalement à faire la même chose que ce que font déjà les humains (Figures 8 et 9). La filière robotique a voulu mettre en avant des preuves de concept pour montrer que les robots pouvaient être tout aussi efficaces que les humains pour réaliser les mêmes tâches qu’eux et ainsi se placer dans une logique d’automatisation pour se substituer à des activités humaines simples et répétitives. La tendance semble être à l’ajout de toujours plus d’intelligence embarquée sur les systèmes robotisés pour être capables de se représenter le monde végétal comme les humains, de pouvoir s’y déplacer et de réaliser des gestes fins. Le problème a encore une fois été pris par le prisme de la technologie, en partant des systèmes actuels pour essayer d’y faire rentrer des robots. La filière robotique parle néanmoins de plus en plus de la volonté d’un « atterrissage » des robots à la ferme, signe que les acteurs regardaient la robotique agricole peut-être d’un peu trop haut avec un point de vue un peu éloigné des problématiques agricoles.
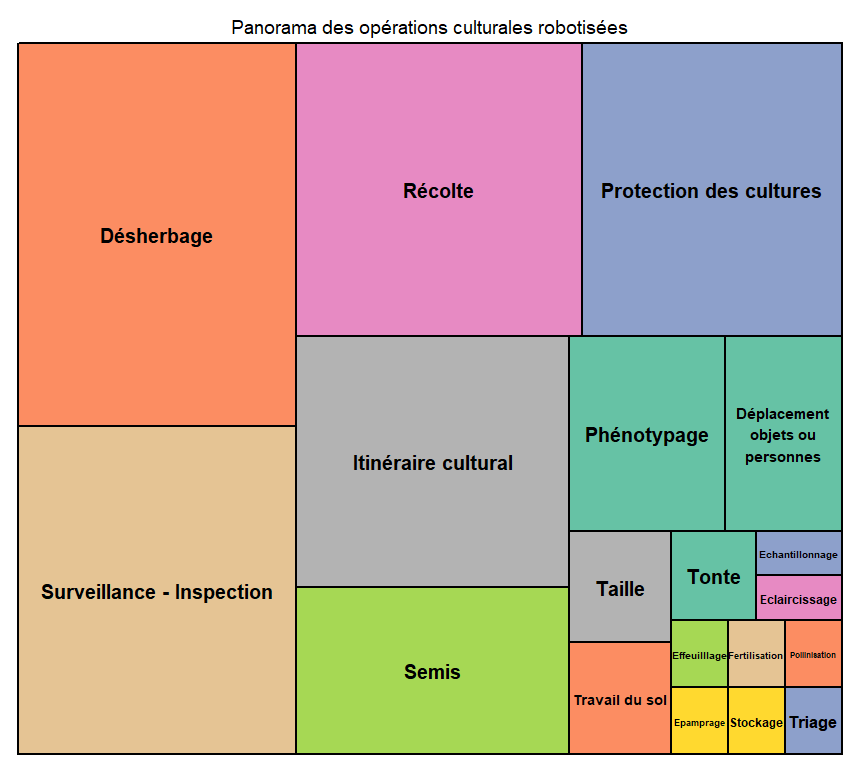
Figure 8. Panorama des opérations agricoles réalisées par des robots en production végétale. La taille des boites représente la proportion de robots s’intéressant à cette opération. L’opération « itinéraire cultural » a été attribuée principalement aux tracteurs autonomes pour lesquelles les tâches à réaliser n’étaient pas claires. Source : Annuaire des outils numériques des agriculteurs
Une première question à se poser est peut-être celle de savoir si les acteurs agricoles achèteront un robot qui fait tout un ou un robot qui fait trop dans le détail. L’automatisation complète d’un processus de production aboutit à une solution non optimale en termes de coût de production. Et l’on se rend compte que pour un robot, réaliser 80% d’une tâche agricole est assez facile mais la terminer en entier avec les 20% restants est diablement plus compliqué (je vous invite à relire le début du dossier de blog). Alors pourquoi mettons-nous autant d’effort en recherche et en tests pour que le robot atteigne les 20% nécessaires à une automatisation complète d’une activité agricole ? Pourquoi demandons-nous autant au robot de réfléchir alors que le cerveau humain est particulièrement efficace pour ça ? L’interaction entre l’homme et la machine offre pourtant des alternatives intéressantes et simplifierait d’autant plus la conception des systèmes robotisés.
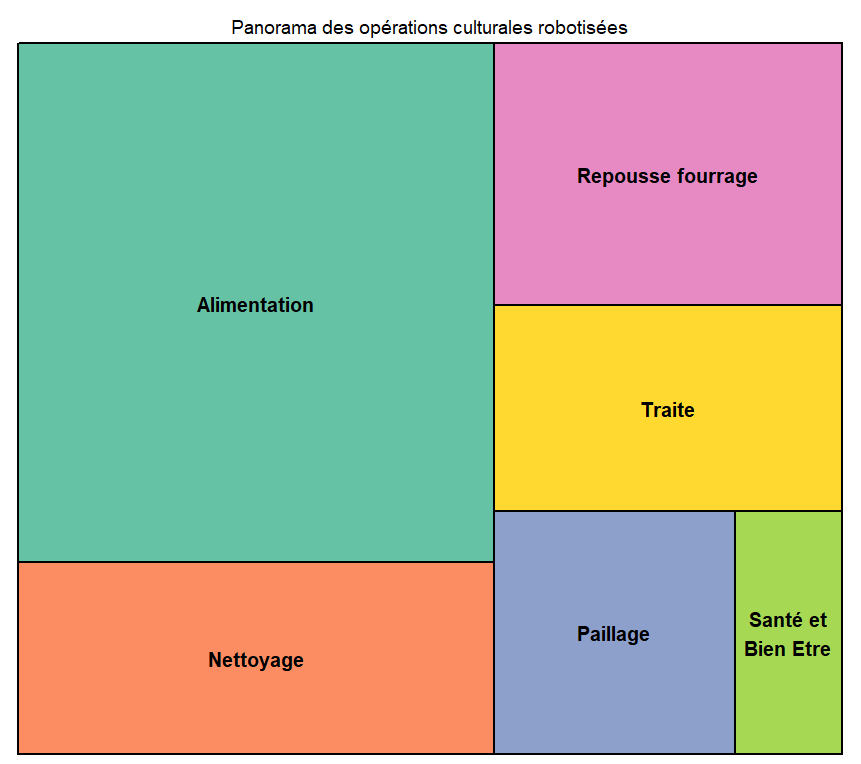
Figure 9. Panorama des opérations agricoles réalisées par des robots en production animale. La taille des boites représente la proportion de robots s’intéressant à cette opération. Source : Annuaire des outils numériques des agriculteurs
Le robot pourrait être conçu principalement pour limiter la pénibilité du travail et réaliser des activités agricoles fatigantes. La cueillette du melon, par exemple, est une tâche particulièrement harassante pour l’humain qui lui demande d’être courbé ou baissé pour ramasser des melons par terre. L’humain réfléchit vite et a mal au dos, alors comment imaginer une activité collaborative ? L’humain pourrait être couché ou allongé sur un système autonome pour la récolte. On pourrait imaginer aussi que l’humain ne soit là que pour identifier ou tagger les melons murs qui seront récoltés par la suite par une unité robotisée, ce qui permettrait d’éviter de devoir installer des algorithmes complexes de vision et de reconnaissance sur les robots. La filière robotique pourrait même proposer des exosquelettes sans électroniques, avec des systèmes de harnais et de ressorts pour accompagner les gestes, comme ce qui est utilisé dans d’autres secteurs industriels. La part belle pourrait aussi être faite aux robots suiveurs, que ce soit pour porter des charges lourdes et laisser les mains de l’opérateur libres, mais aussi pour que le robot puisse réaliser exactement la même chose qu’un opérateur en parallèle (sur le principe du leader-suiveur). Ces dispositifs permettraient de doubler les vitesses de chantier et pallier à la réglementation puisqu’un opérateur serait de facto présent, mais aussi et surtout à aider à réaliser les chantiers que l’agriculteur ne peut pas réaliser tout seul (par exemple les chantiers de betterave). Il faut néanmoins distinguer l’automatisation des fonctions agricoles (récolte, semis…) et l’automatisation des fonctions de sécurité (détection anti-collision, protection contre le retournement, détection sortie de zone de travail …) et c’est principalement sur ces deuxièmes fonctions que les constructeurs devront fixer le curseur pour savoir comment mobiliser un opérateur qui ferait autre chose en même temps. Le système robotisé pourra ou non réaliser sa propre surveillance et assurer ses propres fonctions de sécurité. Si le robot s’appuie sur l’humain, le robot pourra être considéré à la rigueur comme une machine hautement automatisée mais pas comme un système autonome. Si le robot n’est pas autonome, il sera alors compliqué d’imaginer une stratégie basée sur un travailleur à proximité qui réalise une autre tâche.
On peut se demander si les robots actuels pourront répondre à la recherche d’économie d’échelle dans la mesure où ils ont été développés avec des logiques de motorisation électrique (avec du stockage électrique) qui ne sont pas compatibles avec des fonctionnements de grande puissance et sur des longues durée. Et même si c’était le cas, serait-ce réellement un problème ? Un système qui ne répond pas aux économies d’échelle doit répondre à des logiques différentes, et ce pourrait être là toute la valeur ajoutée des unités robotisées, avec des machines autonomes modulaires, capables de réaliser des tâches différentes, et ce sur des cultures différentes. Les systèmes recherchant plutôt une économie de gamme peuvent être des systèmes diversifiés et compatibles avec une production satisfaisante à l’échelle d’une parcelle, tout en étant très performant sur la dimension environnementale. Il est également possible d’imaginer de la robotique pour les choses que nous ne savons pas faire ou ne pouvons pas faire, et ainsi reconcevoir la façon même de retravailler voir de réimaginer ce qu’est un système agricole. Penser la robotique seulement en termes d’économie de main d’œuvre est beaucoup trop simpliste. Actuellement, l’état sanitaire des cultures fruitières (pérennes ou non) est conduit avec des données météorologiques et avec un calendrier d’intervention. Est-ce que les robots pourraient servir à reculer les moments d’intervention voire à en éviter certains ? Nous en avons discuté plus haut mais la récolte est une tâche particulièrement difficile pour les robots. Certains y arrivent, notamment sous serre, mais le débit de chantier est particulièrement lent. Certains interviewés un peu taquins m’auront confié que les robots actuels étaient capables de ramasser des fruits en les abimant et en allant lentement… Plutôt que n’entrevoir les robots que pour la récolte, ne pourrait-on pas imaginer que les robots interviennent pour ramasser des fruits abîmés ? Cette activité confiée aux systèmes robotisés permettrait de limiter les contaminations (et ainsi retarder les premiers traitements et limiter les doses appliquées) mais aussi réduire les besoins de tri en fin de saison. Il est nécessaire de trouver des situations pour lesquelles l’action à réaliser est très importante mais n’est pas trop complexe à réaliser pour le robot. Dans la même veine, les systèmes robotisés pourraient être utilisés pour appliquer des traitements ultra-localisés d’herbicides pour gérer des vivaces (rumex, chardons..) avant que l’agriculteur ne lâche ensuite des auxiliaires. Toujours sur le désherbage, les robots pourraient être utilisés pour enlever les quelques pieds d’adventices résistants derrière un traitement herbicide localisés pour limiter les problèmes de population résistantes. Des robots pourraient se déplacer dans certaines cultures particulières pour aspirer les pucerons ou certains ravageurs (personne n’enverrait un opérateur avec un aspirateur dans les champs). On pourrait même imaginer utiliser des robots pour répondre à des enjeux de santé publique en enlevant des plantes toxiques ou allergisantes sur des chemins de passage ou de traverse dont personne n’a la responsabilité. Tout l’enjeu ici sera de voir comment rentabiliser des robots là où le retour sur investissement n’est pas forcément immédiat.
Robotique et agro-écologie
Les robots pourraient-ils vraiment accompagner la transition agro-écologique dont tout le monde parle ? C’est ce à quoi cherchera à s’atteler le grand défi robotique proposée par l’association française Robagri dans le cadre de la stratégie d’accélération « Systèmes agricoles durables et équipements agricoles contribuant à la transition écologique » (SADEA), et du PIA4, adossés à France 2030. On pourrait commencer par mettre en avant qu’il n’est pas évident de dire si les robots sont adaptés à des itinéraires que l’on n’a pas encore inventés… La robotique ne va pas apporter une solution et une réponse aux impasses dans lesquels se trouvent une partie des systèmes agricoles. Il y a déjà de nombreux blocages à lever avant la partie robotisation sur la compréhension des cultures et de leur interaction avec leur environnement. Les acteurs agricoles manquent de connaissance agronomique et la prise de risque créée par le passage d’un itinéraire classique standard à des itinéraires plus innovants agronomiquement (limitation du travail du sol, introduction de plantes compagnes..) n’est pas assez accompagnée. Les systèmes actuels ont du mal à être économiquement performants et être environnementalement intéressants. Certains acteurs ont tendance à dire que les robots actuels peuvent être intéressants en attendant que l’on ait repensé nos itinéraires culturaux (en termes de stratégie de travail, de pratiques, et de sol), certains les voyant plutôt comme des jouets de transition. Il faudra néanmoins avouer que certains changements de pratiques sont aussi limités par les machines actuelles (on pense par exemple au semis sous couvert). Si les robots sont utilisés pour continuer la même agriculture qu’aujourd’hui, nous irons de toute façon droit dans le mur. Les robots devraient alors peut-être être pensés comme des outils et non pas comme des machines. Le tracteur tout seul ne sert effectivement à rien, il reste juste une source de puissance.
Si l’on considère que les robots ont leur raison d’être dans l’écosystème agricole, est-ce alors au robot de s’adapter à la parcelle et aux itinéraires agricoles, ou est-ce la parcelle qui doit faciliter l’action des robots ? Le curseur se trouve peut-être en réalité un peu entre les deux : l’outil doit co-évoluer avec l’itinéraire technique. Et cette co-évolution est nécessaire au risque de se voir figés sur des types d’itinéraires et de constituer un verrou au changement. Il est de toute façon difficile de raisonner avec le système agricole actuel qui n’est pas figé. On peut effectivement s’attendre à ce que le développement de la robotique entraine une forme de standardisation du matériel végétal et des pratiques – sans y voir nécessairement le mal absolu. Le désherbage mécanique robotisé poussera par exemple peut-être à revoir l’espacement et l’alignement des cultures en rang, les schémas et les densités de semis, et à limiter l’usage de bâches sur lesquels les robots pourraient avoir du mal à circuler. La taille, l’effeuillage ou la géométrie du feuillage pourraient être reconsidérés pour améliorer la capacité de vision/reconnaissance des robots en limitant par exemples les effets d’occlusion par les feuilles. Les infrastructures existantes dans les parcelles (antennes, câbles, grillages, filets anti-grêle, ensachage des arbres…) pourraient être utilisées pour faciliter la navigation des robots ou créer de nouveaux moyens de déplacements (robots suspendus, poteaux avec structures fixes au-dessus des parcelles pour des déplacements de caméras, déplacement de robots sous panneaux photovoltaiques avec les structures porteuses…) ou plus simplement porter de la signalétique visuelle ou RFID pour aider le robot à se déplacer. Ces structures pourraient également être utilisées pour apporter des intrants (semis, engrais, fertilisants…) directement dans les parcelles agricoles pour que des robots de petite taille puissent les récupérer pour leur action au champ.
En production animale, les robots de traite sont des robots fixes à l’intérieur des bâtiments d’élevage. Avec l’organisation spatiale actuelle des champs autour des batiments, les élevages laitiers restent une grande partie de leur temps en stabulation. Pour passer à un système laitier principalement à l’herbe, on pourrait imaginer revoir l’organisation des exploitations, avec par exemple des champs disposés en étoile autour du batiment d’élevage contenant le robot. Ou bien alors imaginer un robot de traite capable d’être installé directement en extérieur. Les expérimentations de la ferme de Trévarez montrent par exemple un robot de traite mobile disposé à la jonction entre deux zones de paturage distinctes – une pour la journée et une pour la nuit. En changeant d’espace de paturage le matin et le soir, les vaches doivent ainsi nécessairement passer par la salle de traite déportée au champ.
Les pratiques agro-écologiques demandent des enjeux forts de fréquence et de précision à la fois sur les pratiques agricoles et sur les passages réalisés, ce à quoi pourraient aider à répondre les robots. L’usage de robots avec des systèmes de géo-positionnement très précis pourrait permettre de reconcevoir les itinéraires agricoles dans le sens où les robots auraient en mémoire les positions exactes de toutes les graines semées (et donc ne plus avoir besoin de système de vision embarquée) et ainsi réaliser des actions mécaniques extrêmement fines comme du binage de cultures dans toutes les directions de l’espace. Cette haute précision de positionnement permet d’envisager également des schémas de semis totalement différents de ceux réalisés actuellement (carroyage, losange…) et d’y intégrer alors toute une complexité de plantes compagnes, de diversité végétale et de stades phénologiques différents cartographiés très précisément dès leur semis, et suivies tout le long du cycle cultural. On pourrait alors imaginer avoir des plantes à divers stades phénologiques au sein de la même parcelle, chacune pouvant être considérée et prise en compte pour conduire à des actions dédiées. Au vu de leur complexité, les systèmes agro-écologiques seront de plus en plus difficiles à observer et à maitriser dans leur globalité. Le découpage d’actions élémentaires (semer, désherber, récolter…) par les robots – en essaim ou non – avec une cartographie dynamique de la parcelle en tête pourraient être mis à disposition pour des tâches ponctuelles et précises : désherber une zone pour repiquer une plantule, retirer des organes sénescents ou malades d’une plante, ou encore récolter ce qui est mûr. Le découpage de tâches élémentaire est aussi intéressant en ce sens qu’il n’est pas bloquant si un des systèmes vient à lâcher et qu’il n’y a qu’une partie de l’itinéraire sur lequel intervenir. En réfléchissant la robotique de manière complètement entremêlée avec d’autres technologies ou systèmes innovants, les unités robotisées permettent d’envisager les hétérogénéités et la diversité (des plantes compagnes, des couverts, des variétés, des stades phénologiques…). Gardez quand même en tête que nous n’y sommes quand même pas encore…
Des questions énergétiques et environnementales encore trop peu considérées
Quid de l’autonomie énergétique des robots ?
Même si certains rechignent toujours à l’accepter, l’agriculture telle qu’elle est réalisée actuellement n’a pu voir le jour qu’avec une énergie abondante et presque exclusivement d’origine fossile. Le secteur en est absolument complètement dépendant. Avec les accords de Paris que la France s’est engagée à respecter, et au travers de sa stratégie nationale bas carbone (SNBC), l’enjeu est à la décarbonation du mix énergétique français, et donc par conséquent de celui du secteur agricole. Rappelons qu’en France, le secteur agricole ne représente que quelques points de PIB (c’est un autre problème…) pour environ 20% des émissions de gaz à effet de serre sur le territoire. Si l’on met de côté les émissions de méthane assez proportionnelles à la taille du cheptel de ruminants et le protoxyde d’azote lié à la fertilisation minérale azotée, la réduction du carbone entrant passera par la décarbonation de la traction agricole. Avec la course au gigantisme et à l’énorme puissance embarquée des machines agricoles, les moteurs diesel ont jusqu’ici eu bon train.
Difficile d’entrevoir très clairement si la taille des machines agricoles robotisées suit une tendance à la baisse par rapport à leurs cousines conventionnelles. L’argument de la limitation du tassement du sol – conséquence directe d’un poids plus faible des robots – est d’ailleurs constamment asséné à qui veut bien l’entendre. Certains travaux de recherche en robotique vont assez loin dans ce sens et cherchent à mesurer et analyser l’influence d’un moindre tassement sur l’état du sol, et à estimer les paramètres de roulement du robot en activité (mesures de déformation, évaluation de la charge, capteurs sur les pneus..). Si l’on se place dans une logique de réduction de la taille des robots, on ne peut passer outre la question de la puissance embarquée sur ces machines robotisées – forcément plus faible lorsque la taille du robot diminue – pour la gestion des activités agricoles. Pour de la surveillance ou des tours de plaine, on peut raisonnablement considérer que les robots ne dépenseront que peu d’énergie. Par contre, certaines pratiques, notamment le travail du sol, demandent une puissance de traction forte, et ce d’autant plus importante que ce travail est profond et que les outils à tracter sont lourds. Une manière de s’en sortir pourrait être d’associer des petits robots en essaim, chacun ayant une tâche élémentaire à réaliser, ou de chercher à combiner ou associer des robots entre eux pour accéder à plus de puissance disponible et transporter et tracter des outils lourds.
La question de l’énergie dans un chantier agricole robotisé n’a pour l’instant pas été complètement résolue. Si de nombreux robots sont propulsés par de l’énergie électrique (électrique filaire, électrique sur batterie, panneau solaire embarqué) – surtout lorsqu’elle est produite par des vecteurs énergétiques dits « décarbonés », une partie d’entre eux reste alimentée par des moteurs thermiques et/ou hybrides (Figure 10). Les enjeux autour de l’énergie sont d’autant plus importants que la limitation des capacités énergétiques est un frein à l’utilisation de machines robotisées sur les parcelles agricoles. Et les raisons sont assez nombreuses. Les débits de chantiers des outils sont assez faibles ce qui impose qu’ils puissent travailler pendant assez longtemps. Les impacts environnementaux peuvent être potentiellement plus élevés (notamment si le robot doit être transporté entre les parcelles et les bornes de recharge si le robot est alimenté par batterie électrique). Les robots doivent réaliser des interventions avec des actions délicates et ciblées, peu compatibles avec des chantiers courts et facilement programmés dans le temps
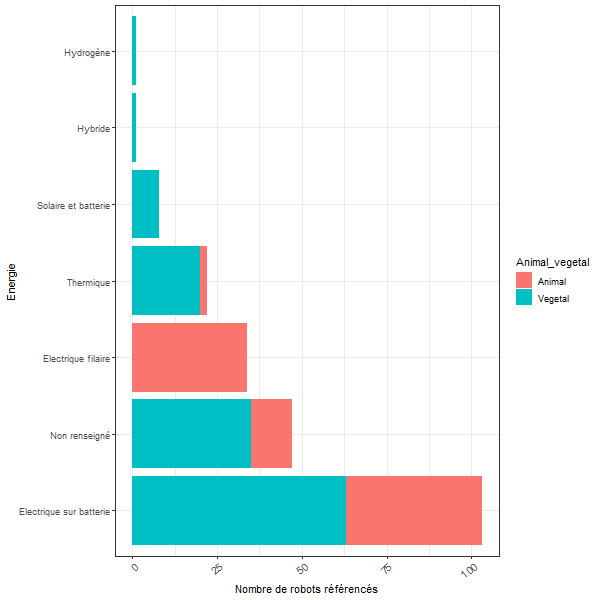
Figure 10. Panorama des robots par vecteur énergétique. ATTENTION : les informations ne sont pas toujours correctement renseignées chez les constructeurs. Source : Annuaire des outils numériques des agriculteurs
L’enjeu de l’électrification des robots questionne nécessairement leur autonomie et nous demande aussi de réfléchir à notre capacité à produire cette électricité. Les batteries présentes sur les robots électrifiés ont besoin d’être rechargées (comme sur des véhicules électriques classiques), ce qui présuppose de devoir ramener le robot à une borne de recharge, surtout si les parcelles sont loin de l’exploitation principale. Et plus les robots sont lourds, plus les batteries devront être puissantes et mettront du temps à se recharger, limitant potentiellement d’autant plus l’autonomie des robots dans le cadre de leurs activités. Notons que certains géreront cette contrainte avec des robots hybrides. D’autres préfèreront installer des packs de batteries sur les robots pour éviter de devoir les manipuler régulièrement.
Les robots actuels doivent embarquer beaucoup trop de fonctionnalités et de matières premières (semis, engrais…) pour être complètement autonomes dans les parcelles agricoles. L’approvisionnement en énergie électrique sur les parcelles d’utilisation est ainsi en ligne de mire des acteurs du secteur. Un des premiers sujets d’intérêt tourne autour des bornes de recharge. L’idée est ici d’acheminer la matière et l’énergie directement au point d’utilisation (dans la parcelle) plutôt que d’imaginer avoir un robot 100% autonome sur l’entièreté de ses activités. Peut-on mettre en place une borne de recharge dans les parcelles et ainsi diminuer les allers-retours du robot ? Est-ce que plusieurs producteurs voisins pourraient utiliser la même borne ? Comment pourraient être alimentées ces bornes de recharge (et les batteries des robots) : par des petites centrales éoliennes sur l’exploitation, par des installations solaires directement sur les parcelles, par des unités de méthanisation, en utilisant des technologies à hydrogène ? Les réponses ne sont pas évidentes et dépendent des conditions climatiques de l’exploitation agricole, de ses objectifs et contraintes de production, ou encore du contexte d’utilisation de l’énergie produite. Je vous renvoie d’ailleurs à un précédent dossier sur l’agrivoltaisme.
En France, le gestionnaire de réseau de distribution de l’électricité « Enedis » a récemment intégré l’association Robagri – signe que la thématique semble intéresser également des acteurs qu’on ne s’attendait peut-être pas à voir ici. Il semblerait que 80% des parcelles agricoles soient situées à moins d’1 km du réseau Enedis et qu’il serait donc ainsi possible de tirer parti des lignes à haute tension pour mettre en place des stations de recharge déportées dans les champs. Certains pourraient profiter de ces stations pour y intégrer des infrastructures de communication à plus ou moins haut débit et appuyer les opérations robotique (reconnaissance et vision du robot, détection d’obstacles, contrôle du robot et des outils associés, communication avec un superviseur de robots en cas de problèmes ou situations dangereuses, remontées de données de fonctionnement du robot…). Ces stations de recharge pourraient également être des lieux sécurisés pour le robot lorsqu’il n’est pas en fonctionnement.
Dans la continuité des bornes de recharge, on pourrait imaginer également utiliser les infrastructures existantes dans les parcelles (câbles, perches, fils, poteaux, grillages…) pour apporter de l’énergie électrique aux robots (et/ou pour leur permettre de se déplacer dessus comme nous l’avons discuté plus haut), mais aussi pour mettre à disposition les matières premières (semence, fertilisation..) pour limiter par exemple la charge des cuves (et par conséquent le besoin en énergie) transportées par les robots. Des réseaux d’alimentation électrique pourraient être installés en parallèle des réseaux d’irrigation présents. Un interviewé m’aura évoqué le cas d’un projet de start-up avec un robot présent sur un système d’arrosage et utilisant l’énergie du système hydraulique pour se déplacer.
Sans surprise, le choix de l’électrification devra se faire en connaissance de cause des risques d’approvisionnement en matériaux et minerais critiques, notamment pour le développement des batteries. On sait par exemple déjà qu’il y aurait des gros problèmes d’approvisionnement en élément comme le lithium si toute la population adoptait un véhicule électrique. Même si les ordres de grandeur ne sont pas les mêmes dans le seul contexte agricole, la résilience du modèle agricole à des chocs d’approvisionnement ne peut pas être négligée. Certains opérateurs robotiques auront fait le choix de séparer l’achat du robot et la location des batteries, une manière pour eux de mieux gérer leurs stocks et s’assurer une durée de vie plus longue des batteries.
Les robots actuels ne peuvent pas fonctionner 24h/24 et il ne semble pas y avoir eu de réelle réflexion et de travaux sur l’autonomie nécessaire d’un robot en fonction de son activité agricole. L’énergie ne coûte peut-être encore pas assez cher – même si le conflit russo-ukrainien a largement fait grimpé les prix et demandé à certains Etats de déployer des boucliers tarifaires. Il semble néanmoins nécessaire de se placer dans des situations de prix de l’énergie très élevées pour tester la résilience des modèles agricoles robotisés qui pourront être proposés.
Analyse du cycle de vie (ACV) des systèmes robotisés agricole
Si la robotique a plutôt tendance à être mise avant comme un outil pour accompagner la transition écologique du secteur agricole, force est de constater qu’à l’heure de l’écriture de ce dossier, quasiment aucune étude d’impact environnemental ou d’analyse du cycle de vie (ACV) n’a été présentée sur la robotique agricole. J’insiste ici sur le fait qu’il ne faut pas se concentrer seulement sur l’analyse du cycle de vie du robot en tant que tel mais bien sur l’analyse du cycle de vie du robot au sein d’un système agricole.
Après avoir lu les sections précédentes, vous devriez maintenant être conscients que la robotique agricole soulève de nombreuses questions environnementales :
- les robots agricoles mono-tâches ne sont utilisés au final que très peu de temps sur l’ensemble du cycle cultural et passent la majeure partie de leur temps dans un hangar. J’aurais entendu dans mes interviews un taux d’utilisation de tracteurs conventionnels de 10% (rapport entre le temps passé au champ et le temps passé dans le hangar) en comparaison d’un taux de 2-3% pour les robots très spécialisés. Le tracteur est effectivement utilisé pour plusieurs opérations agricoles et son impact peut alors être alloué à plusieurs cycles de travail ou lissé sur l’ensemble de la production. Dans ce cadre-là, la vente de robots unitaires pose ainsi questions dans le sens où une économie de la fonctionnalité (vendre un service de désherbage plutôt qu’un robot de désherbage) ou l’achat mutualité de robots (au sein d’une CUMA par exemple) pourrait faire remonter les faibles taux d’utilisation des outils robotiques.
- les batteries des robots électrifiés devront être fabriquées et recyclées à la fin de leur utilisation (et on connait toute la complexité de cette étape de recyclage)
- les robots agricoles, au regard des réglementations actuelles, doivent être déplacés et transportés sur les parcelles agricoles, ce qui génère directement des impacts dus à l’utilisation d’un transporteur
- les robots actuels sont encore pour beaucoup au stade de développement ou de test et il est nécessaire de les réparer plus régulièrement.
Les travaux d’analyse du cycle de vie (ACV) en robotique en sont encore à leur balbutiement. Un travail récent a cherché à comparer les pratiques de désherbage conventionnelles en viticulture (entre les rangs et sous les rangs) à celles d’un désherbage mécanique robotisé dans certains grands terroirs français (Pradel et al., 2022). Même sur ce cas d’étude relativement restreint, le travail est loin d’être évident. La mesure de l’impact de la robotique agricole demande de pouvoir mesurer des impacts tant d’un point de vue agronomique qu’environnemental et il n’existe pas aujourd’hui de métriques capables de quantifier et d’objectiver ces éléments. Plutôt que de travailler en absolu, une solution d’évitement pourrait être de définir des itinéraires culturaux de référence et d’y comparer des systèmes robotisés à des systèmes conventionnels. Encore faut-il être capable de pouvoir caractériser précisément ces références et surtout de pouvoir les choisir. Doit-on se comparer un système conventionnel classique ? Doit-on se comparer à un système aux pratiques agronomiques innovantes ? Comment choisir une référence lorsque les itinéraires classiquement utilisés varient par territoire, comme c’est par exemple le cas pour le désherbage de la vigne ? Des compromis sont également à trouver en termes de taille et d’autonomie de robots dans le sens où une flotte de robots pourrait être moins intéressante d’un point de vue ACV s’il faut les transporter régulièrement et si l’autonomie énergétique au champ ne peut pas être assurée. Les flux logistiques de transport des machines et des opérateurs, et l’autonomie des opérations au champ semblent être à ce jour les axes de travail identifiés pour limiter l’empreinte carbone (et pas l’analyse du cycle de vie complète) de systèmes robotisés. Le transport des opérateurs est ici lui aussi considéré dans le sens où des besoins de réparation régulière demanderont aux opérateurs de se déplacer sur les parcelles.
La difficulté de ces analyses réside également dans le fait que les bases de données actuelles pour réaliser les analyses de cycle de vie ne sont pas assez consolidées. Au sein d’Agribalyse par exemple – la base de données de référence sur les sujets agricoles – les machines agricoles actuelles sont encore simplement considérées comme de la ferraille et de l’acier alors que l’électronique embarquée ne peut plus vraiment être négligée (il suffit de regarder la quantité de cables et consoles qu’il peut y avoir dans une cabine de tracteur). Et quand on commence à s’intéresser à l’empreinte carbone des outils numériques potentiellement installés sur les machines – et les robots sont pour beaucoup chargés de capteurs – le bât commence à blesser parce que les facteurs d’émission du numérique manquent à l’appel. Ces technologies numériques, outre leur cycle de vie propre, vont pour la plupart permettre de collecter tout un tas de données (fonctionnement machine, état de la biomasse végétale, qualité sanitaire d’une parcelle…) dont la quantité est loin d’être négligeable. En suivant la collection de données sur un parcellaire italien pendant 15 ans et en faisant un peu de prospective, un article récent de Kayad et al. (2022) estimait par exemple à 40 Giga bytes (GB) la quantité de données collectées par hectare en 2025 à partir d’outils numériques. Gardez quand même en tête que ce parcellaire était suivi pour faire de la recherche et donc que naturellement les auteurs y avaient collecté pas mal de données (et qu’à mon humble avis, à y creuser de plus près, certaines données – particulièrement satellitaires – pourraient avoir été sous estimées). Les auteurs montrent néanmoins des ruptures de pente forte quant à la quantité de données stockées avec l’avènement de certaines technologies d’acquisition de données (notamment les drones).
Les robots de surveillance (scouting en anglais) sont susceptibles de collecter des quantités absolument gigantesques de données. On y retrouve là encore des enjeux de stockage mais aussi et surtout des enjeux de communication. Avec les technologies embarquées de vision, on peut s’attendre à ce que les robots collectent des milliers d’images par hectare. A des résolutions de quelques méga-octets par image, la note est tout de suite assez salée et ce sont ainsi plusieurs giga de données qu’il est possible de collectionner par hectare (et ce pour simplement un type de surveillance). Les infrastructures de communication n’étant pas assez solides en contexte agricole (bon courage pour la 5G dans les exploitations agricoles), l’enjeu sera de pouvoir embarquer le traitement directement sur la machine (on parle ici d’«edge computing » en comparaison au « cloud computing » réalisé sur des serveurs extérieurs au robot) pour pouvoir ne garder que les résultats des traitements – beaucoup plus légers en termes informatiques (ex : la présence ou non d’une maladie, une estimation de rendement…) – et de jeter les images acquises pour éviter de devoir les transférer elles-aussi. Et ces dispositifs d’edge computing se devront nécessairement d’être puissants et économiques dans la mesure où il ne sera pas possible de mettre des infrastructures de calculs de plusieurs milliers d’euros sur une machine agricole robotisée. Il y aura bien sûr encore des enjeux énergétiques si l’on imagine des machines autonomes frugales puisque les calculs de haute performance sont particulièrement gourmands en énergie.
L’analyse du cycle de vie reste pour l’instant encore trop comme un nouveau critère d’évaluation des robots alors qu’elle devrait en être la clef d’entrée, une sorte de cadre qui contraindrait les développements de la robotique actuelle. La filière robotique est encore jeune, et sans acculturation sur les enjeux de transition énergétique et environnementale, le risque est grand que les robots s’embourbent et ne puissent revenir que très difficilement en arrière.
Quel imaginaire et modèle de société voulons-nous ?
Nous avons parlé à plusieurs reprises de co-évolution entre l’humain et la machine, mais il sera également fondamental de faire échanger différentes disciplines de travail et différents acteurs de la société. A l’heure actuelle, la prédominance des chercheurs issus de l’ingénierie dans la filière robotique – qui ne connaissent que très peu le monde agricole – a principalement conduit à développer des unités robotisées intégrés au modèle agricole actuel et imaginés pour réaliser exactement les mêmes tâches que les humains. Les agronomes et les roboticiens doivent travailler de pair pour s’assurer que les robots proposés ne seront pas simplement imaginés dans une logique d’automatisation mais bien qu’ils se seront positionnés sur un modèle agricole de qualité. Les agronomes et écologues devront certes se concentrer sur la production agricole et environnementale mais ne pas oublier les dimensions opérationnelles des activités agricoles (temps de main d’œuvre, contraintes de mise en place…). Il faudra être capable d’arriver à converger sur le terrain, et les résultats et livrables seront nécessairement plus réalistes que ce qui se trouve dans la tête des roboticiens d’un côté ou des agronomes de l’autre. Certains robots sont imparfaits, et c’est une réalité, mais les premières vendangeuses et moissonneuse-batteuse étaient une catastrophe à leur début, avant de co-évoluer vers quelque chose de plus opérationnel.
J’insiste ici sur le fait que la présence de systèmes robotisés dans un contexte agricole ne doit pas être imaginé dans une assertion binaire. Les approches de numérisation et de robotisation sont extrêmement nombreuses et chacun pourra y trouver midi à sa porte. Le gradient est immense entre une exploitation entièrement automatisée et robotisée et une exploitation qui aura fait le choix de se détourner entièrement de ces outils-là, avec des espaces où les outils numériques et robotiques accompagneront les choix et itinéraires agricoles et où une grande place sera encore laissée au libre arbitre. Et l’on pourrait même se demander si les agriculteurs seraient prêts à superviser des robots à distance même s’ils le pouvaient. Il reste difficile aujourd’hui d’évaluer le spectre des imaginaires tant les possibilités d’évolution de la filière sont nombreuses. Il est par exemple possible que l’application de pesticides augmente à mesure que les coûts d’application diminuent ou que des pesticides plus puissants – et peut-être dangereux – soient utilisés une fois que les tâches de pulvérisation auront été dédiées aux robots.
Dans la mesure où les robots agricoles peuvent à la fois ouvrir les voies d’une utopique écologique mais aussi celle d’un renforcement du modèle industriel dominant (je vous invite à relire la section sur les fractures et les risques ouverts par la robotique agricole), il faudra s’assurer de mettre un maximum d’acteurs autour de la table pour que l’avenir des robots ne soit pas simplement décidé par une poignée de constructeurs et d’agriculteurs, mais bien par la société dans son ensemble (j’avais assez largement évoqué le concept d’innovation et de recherche responsable – RRI – dans un précédent dossier de blog https://www.aspexit.com/agriculture-numerique-prenons-nous-vraiment-la-bonne-direction/#Vers_une_recherche_et_une_innovation_responsables). L’articulation entre l’agriculture et la technologie devra être abordée de front, surtout que les horizons de temps sont extrêmement variés entre les changements de demande des consommateurs, les cycles de développement ou encore les temps réglementaires. L’orientation ou non vers la robotique imposera des choix de société et des modèles d’exploitations agricoles (changement de pratiques, arrêt de certaines cultures, adaptation ou non des exploitations à la robotique…). Doit-on par exemple accepter le développement de robots de pollinisation ? Quand l’on sait que des millions d’années d’évolution auront permis d’améliorer la pollinisation par les plantes et les insectes, doit-on réellement essayer de se substituer à la nature et de se tourner vers le transhumanisme ? La robotique pourrait nous pousser à accepter des situations extrêmes que nous ne désirons pas. L’agriculture reste effectivement un terrain de jeu pour certains industriels et nous devons conjointement décider à quel moment l’automatisation où l’industrialisation doit s’arrêter. Si des robots sont actuellement capables d’automatiser presque entièrement la construction de véhicules, pourrait-on s’attendre à ce que des unités robotisées soient capables de fabriquer du jambon ?
Comme nous en avons discuté, la robotique se développe de plus en plus sous serre (légumes feuilles, légumes fruits, semences…), pour des raisons assez évidentes de facilité d’implémentation (facilité de naviguer, production standardisée…). Bien que les serres (horizontales, verticales, container…) posent des questions en termes énergétiques, ces formats sont encore très largement mis en avant dans les médias traditionnels. Je rappellerais ici que l’agriculture urbaine n’a aucune raison de nourrir la planète. L’exemple de la population parisienne actuelle, qui a besoin d’une ceinture de 150 à 300km pour se nourrir en est un plutôt bel exemple. Ce n’est néanmoins pas une raison pour s’opposer frontalement à ces systèmes agricoles – parfois très robotisés – qui peuvent être l’occasion de répondre à des demandes de niches (en fruits, pour des profils de population particulier), de revaloriser des espaces perdus en ville, ou tout simplement pour reconscientiser la population sur la production agricole. Certains dispositifs sous serres robotisées auront poussé très loin la réflexion autour de leur système agricole en cherchant à limiter la pénibilité des opérateurs agricoles au travers d’un pont roulant déplaçant des outils robotisés tout en gardant une production agricole en pleine terre.
Vers une acceptabilité des robots en contexte agricole ?
Les machines robotisées agricoles seront-elles largement acceptées par la population si elles commençaient à se démocratiser ? Quel impact aurait un label « produit agricole sans robot » ? Quelle image aurait un lait bio produit de manière complètement autonome ? Quelle place donnerait-on à du lait produit dans un pays limitrophe de manière manuelle par rapport à un lait produit à proximité à l’aide d’unités robotisées ? Toutes ces questions sont en réalité plutôt d’ordre sociétale et politique que technologique. Elles font écho aux réflexions sur le modèle agricole vers lequel nous souhaitons converger mais aussi à la représentation que la population se fait du monde agricole. La robotique aura du mal à rentrer dans les mœurs si ses seuls messages tournent autour d’une économie de main d’œuvre. Il y aura besoin de changer le périmètre de la réflexion si la filière souhaite que les consommateurs aient envie que ces robots voient le jour, avec par exemple des cahiers des charges spécifiques pour mettre en avant la diminution de traitements chimiques
L’arrivée d’un nouvel outil technologique est toujours perturbante et son adoption suit généralement un processus de co-évolution dans le sens où à la fois l’homme et l’outil s’adaptent pour converger vers une utilisation la plus adéquate. Quand les premiers tracteurs ont été introduits en agriculture, il était relativement difficile d’imaginer ce à quoi ils pouvaient servir. Les agriculteurs avaient ainsi plutôt tendance à les utiliser d’une façon assez similaire à leurs chevaux. Certains agriculteurs n’auront de toute façon jamais réussi à accepter ou à passer à l’usage de tracteurs (et il n’y a absolument aucun problème avec ça – les trajectoires de mécanisation sont multiples) mais d’autres auront pu au contraire co-évoluer avec la machine pour l’appliquer à des usages auxquels ils n’auraient jamais pensé auparavant.
Les machines robotisées autonomes, si elles voient le jour, suivront le même long processus d’adoption. C’est d’abord une relation de confiance qui devra être construite entre l’agriculteur et les constructeurs pour qu’ils s’assurent que les tâches réalisées par le robot soient aussi bien faites que s’ils les avaient réalisées eux-mêmes. Les constructeurs pourront proposer une évolution progressive dans l’utilisation des robots, en commençant par exemple par électrifier les tracteurs, à autonomiser les tracteurs en laissant la possibilité à l’agriculteur de reprendre le contrôle, ou encore à déployer des flottes de robot avec un niveau d’autonomie variée vis-à-vis d’un tracteur ou robot leader dirigé par exemple par l’agriculteur. Certains roboticiens chercheront à ne pas introduire de rupture technologique trop forte (en gardant par exemple des systèmes d’accroche classique pour de porte-outils) pour que les agriculteurs s’habituent à des systèmes robotisés dans leur contexte actuel avant d’ouvrir espaces de créativité autour des robots. Ces approches progressives permettront de faciliter l’appropriation des outils robotiques et de laisser la capacité à l’agriculteur d’entrevoir au fur et à mesure comment les robots pourraient s’intégrer dans ses itinéraires culturaux et co-évoluer avec eux. L’autonomie de la conduite sera peut-être la dimension la plus longue à faire accepter dans le sens où la conduite du tracteur est encore très largement ancrée dans les mentalités agricoles. Sur des machines mécanisées (mais non autonomes) avec une navigation par positionnement GNSS très précis, une fois que les outils attelés sont bien paramétrés et attelés, l’opérateur est essentiellement présent pour réaliser les demi-tours et la valeur ajoutée de cette présence humaine, surtout si c’est un agriculteur, est assez limitée. Si l’on parle maintenant de coût, l’agriculteur ne comptera peut-être pas ses heures, mais ce ne sera pas la même chose pour un salarié. La conduite autonome sera pourtant peut-être l’occasion de laisser de côté les activités routinières et d’être actif sur des activités autres (aller à l’AG de sa coop, faire de la vente, faire de la veille agronomique…) ou repenser l’organisation du travail agricole en laissant beaucoup plus de place à l’observation du terrain, à l’agronomie et à la compréhension des phénomènes du vivant.
Le recensement agricole de 2021 a montré que le nombre d’exploitations agricoles (actuellement autour de 390.000) avait continué à baisser depuis la dernière décennie, à un rythme néanmoins moins soutenu que sur les décennies précédentes. Si cette baisse peut surprendre et même légitimement inquiéter, les fermes ne disparaissent au final que très peu (et celles qui tombent ne sont pas nécessairement les plus petites) et sont principalement rachetées. Les exploitations de taille moyenne s’agrandissent mais les plus grosses structures elles, en moyenne, ne continuent pas à grossir. L’agrandissement des exploitations va de pair avec une professionnalisation de la filière qui se doit d’être toujours plus technique (gestion des résistances aux adventices sans chimie, gestion de l’effondrement de la fertilité des sols…) et de répondre aux exigences toujours plus importantes de la société. En étant un peu piquant, on pourrait d’ailleurs se demander si, en France, ce n’est pas en voulant maintenir des structures familiales en agriculture que l’on a favorisé (directement ou indirectement) le déploiement des outils robotiques. En exemple et comme nous l’avons discuté dans ce dossier, les très grosses fermes laitières dans certains pays industrialisés ne sont pas équipées de robots de traite mais plutôt de rotolactor.
Il ne pourra de toute façon pas y avoir d’évolutions des systèmes de production si l’ensemble de la société ne bouge pas. Nos modes de production et de consommation nous emmènent droit dans le mur. Fort heureusement, le ministère de l’agriculture a récemment changé de nom pour devenir le ministère de l’agriculture et de la souveraineté alimentaire… La vitesse du déréglement climatique est non soutenable – et en grande partie liée à nos modes de production et de consommation, et ces émissions augmentent linéairement avec la recherche d’économies d’échelle. La technologie a certes une part de responsabilité mais il ne faut pas la tenir responsable pour tout. Même si la numérisation et la robotisation de certains pans de nos activités pourraient en faire fuir plus d’un (sur-équipement d’agriculteurs déjà endettés, image négative de la filière, perte d’emploi dans le secteur..), il faut néanmoins se méfier de la diabolisation à outrance et assumer nos choix de société. Dans notre écosystème mondialisé actuel, le refus de la robotisation pourrait imposer de délocaliser certaines productions ou au contraire d’augmenter très largement notre contribution financière au secteur agricole en soutenant fortement l’installation de jeunes bien rémunérés et en augmentant significativement la part de notre budget alloué à l’alimentation. Si nous n’y sommes pas prêts, la tendance restera à réduire les charges de mécanisation et à diminuer la masse salariale sur les exploitations (à 20€ l’heure de conduite de tracteur, le choix d’un robot pour diminuer les coûts directs a du sens), constats auxquels la robotique agricole actuelle permet de répondre.
En guise de conclusion
Les systèmes robotisés se sont largement développés en agriculture, c’est une réalité. Malgré tout, si le panorama des systèmes robotiques est extrêmement large, encore relativement peu d’unités robotisées sont présentes dans les exploitations agricoles. Dans leur grande majorité, les robots s’intègrent aux exploitations d’élevage – principalement sur des fermes de bovin laitières avec des robots de traite – parce que les environnements de travail plus structurés facilitent leur implémentation. Les robots en production végétale sont très nombreux dans le panorama, mais encore très peu disponibles sur le terrain. Force est de constater que le positionnement des acteurs de la robotique sur la filière agricole reste encore assez flou et que chacun semble encore chercher sa place. Il n’est d’ailleurs pas évident de savoir si les robots proposés sont effectivement fonctionnels, s’ils sont en tests, ou alors en complet développement.
Malgré tout le ramdam fait autour de l’autonomie autour de la robotique agricole, aucun robot n’est réellement 100% autonome parce qu’un opérateur doit toujours être là pour le déplacer sur une parcelle ou encore l’accompagner au cours de ses activités agricoles. De nombreuses études scientifiques ont pu trouver des scénarios dans lesquels des opérations autonomes ou en collaboration avec un humain étaient rentables, mais cela ne signifie à aucun moment que des équipements ou robots autonomes seront développés pour ces situations-là dans la mesure où certains marchés sont trop petits pour couvrir les coûts de développement.
L’introduction des robots dans un contexte agricole est une question encore ouverte qui n’a pas été résolue. Les dimensions à considérer sont extrêmement larges et ne peuvent se résumer à de simples positions binaires, surtout que les trajectoires de numérisation et robotisation dans les exploitations agricoles sont extrêmement variées. L’enjeu sera de mettre de nombreux acteurs autour de la table (publics, privés, citoyens..) pour décider ensemble de modèles agricoles souhaitables et de l’articulation entre agriculture et technologie.
Soutenez Agriculture et numérique – Blog Aspexit sur Tipeee[mailpoet_form id= »1″]
Bibliographie complémentaire aux entretiens
Basu, S. et al. (2020). Legal framework for small autonomous agricultural robots. AI & Society, vol 35:113-134
Daum, T. (2021). Farm robots : ecological utopia or dystopia ? Trends in Ecology & Evolution, vol 20
Ditzler, L. & Driessen, C. (2022). Automating Agroecology: How to Design a Farming Robot Without a Monocultural Mindset? Journal of Agricultural and Environmental Ethics, vol 35: 2
Driessen, C. & Heutinck (2014). Cows desiring to be milked? Milking robots and the co-evolution of ethics and technology on Dutch dairy farms. Agricultural Human Values. 18p
EU Robotics (2021). European Robotics in agri-food Production. Opportunities and Challenges
GIS Relance Agronomique (2018). Demain l’Agriculture. Concours de Nouvelles. Educagri Editions.
FAO (2020). Agriculture 4.0. Agricultural robotics and automated equipment for sustainable crop production. Integrated Crop Management, vol 24
Kayad et al. (2022). How many gigabytes per hectare are available in the digital agriculture era? A digitization footprint estimation. Computers and Electronics in Agriculture, 198
Lachia (2018). Usage des robots en agriculture. Observatoire des usages de l’agriculture numérique https://agrotic.org/observatoire/2018/10/09/usage-des-robots-en-agriculture/
Lenain et al. (2020). Agricultural robotics : part of the new deal. With 27 agricultural robot information sheets. FIRA 2020 Conclusions. Editions Quae
Lowenberg‑DeBoer, J. et al. (2019). Economics of robots and automation in field crop production. Precision Agriculture, vol 21: 278-299
Lowenberg‑DeBoer, J. et al. (2021). Economics of autonomous equipment for arable farms. Precision Agriculture, vol 22: 1992-2006
Lowenberg‑DeBoer, J. et al. (2021). Lessons to be learned in adoption of autonomous equipment for field crops. Applied Economy Perspective Policy, 1-17
Lowenberg‑DeBoer, J. et al. (2021). The impact of regulation on autonomous crop equipment in Europe. International Conference on Precision Agriculture. John V. Stafford (ed.)
Lytridis, C. et al. (2021). An Overview of Cooperative Robotics in Agriculture. Agronomy, vol 11
Marinoudi, V. et al. (2019). Robotics and labour in agriculture. A context Consideration. Biosystems Engineering, vol 184: 111-121
Martin, P. (2021). A Future-Focused View of the Regulation of Rural Technology. Agronomy, vol 11
Martin, T., et al. (2021). Diversité et spatialité de la France laitière par le prisme des entreprises du robot de traite. Journées de Recherches en Sciences Sociales (JRSS), INRAE; SFER; CIRAD,
Martin, T., et al. (2021). Robots and Transformations of Work on Farms: A Systematic Review. The 2nd International Symposium on Work in Agriculture
Oliveira, L.F.P. (2021). Advances in Agriculture Robotics: A State-of-the-Art Review and Challenges Ahead. Robotics, vol 10
Pearson, S. (2022). Robotics and Autonomous Systems for Net Zero Agriculture. Current Robotics Reports, vol 3:57-64
Pradel, M. et al. (2022). Comparative Life Cycle Assessment of intra-row and inter-row weeding practices using autonomous robot systems in French vineyards. Science of the Total Environnement, vol 838
Redhead, F., et al. (2015). Bringing the Farmer Perspective to Agricultural Robots. CHI 2015, Crossings, Seoul, Korea
Rose, D.C. et al. (2021). Responsible development of autonomous robotics in agriculture. Nature Food, Comment, vol 2
Shockley, J. (2021). How will regulation influence commercial viability of autonomous equipment in US
production agriculture? Applied Economy Perspective Policy, 1-14
Sparrow, R. & Howard, M. (2020). Robots in agriculture: prospects, impacts, ethics, and policy. Precision Agriculture
Vasconez, J.P. (2019). Human-Robot Interaction in Agriculture: a Survey and Current Challenges Biosystems Engineering, vol 179:35-48
Vik, J. et al. (2019). The political robot – The structural consequences of automated milking systems (AMS) in Norway. NJAS – Wageningen Journal of Life Sciences. 9p
Personnes Interviewées
| Nom | Structure |
| Guillaume BOCQUET | AXEMA |
| Jean-Pierre CHANET | INRAE |
| Christian GERMAIN et Florian RANCON | Laboratoire IMS – Chaire AgroTIC |
| Romain FAROUX | Consultant |
| Amélie FISCHER et Clément ALLAIN | Idele |
| Michael FONTANIN | Vitibot |
| Jean-Albert FOUGEREUX | FNAMS |
| Christian HUYGHE | INRAE |
| Florentin KACAR | CTIFL |
| Roland LENAIN | INRAE |
| James LOWENBERG- DeBOER | Harper University |
| Léo PICHON | Montpellier SupAgro – Chaire AgroTIC |
| Xavier REBOUD | INRAE – Robagri |
| Davide RIZZO | UniLaSalle – Robagri |
| Cédric SEGUINEAU | Naïo Technologies |
| Kévin TAMBOISE | Agriculteur |
| Inès TEETAERT | Arvalis |
| Bruno TISSEYRE | Montpellier SupAgro – Chaire AgroTIC |
2 commentaires sur « La robotique est dans le pré : où sommes-nous et où allons-nous ? »